

Walking control system and method for robot
A walking control and robot technology, applied in the field of robots, can solve the problems of high deployment and maintenance costs, low positioning accuracy, and poor stability, and achieve the effect of improving motion control accuracy and efficiency, reducing intelligence requirements, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
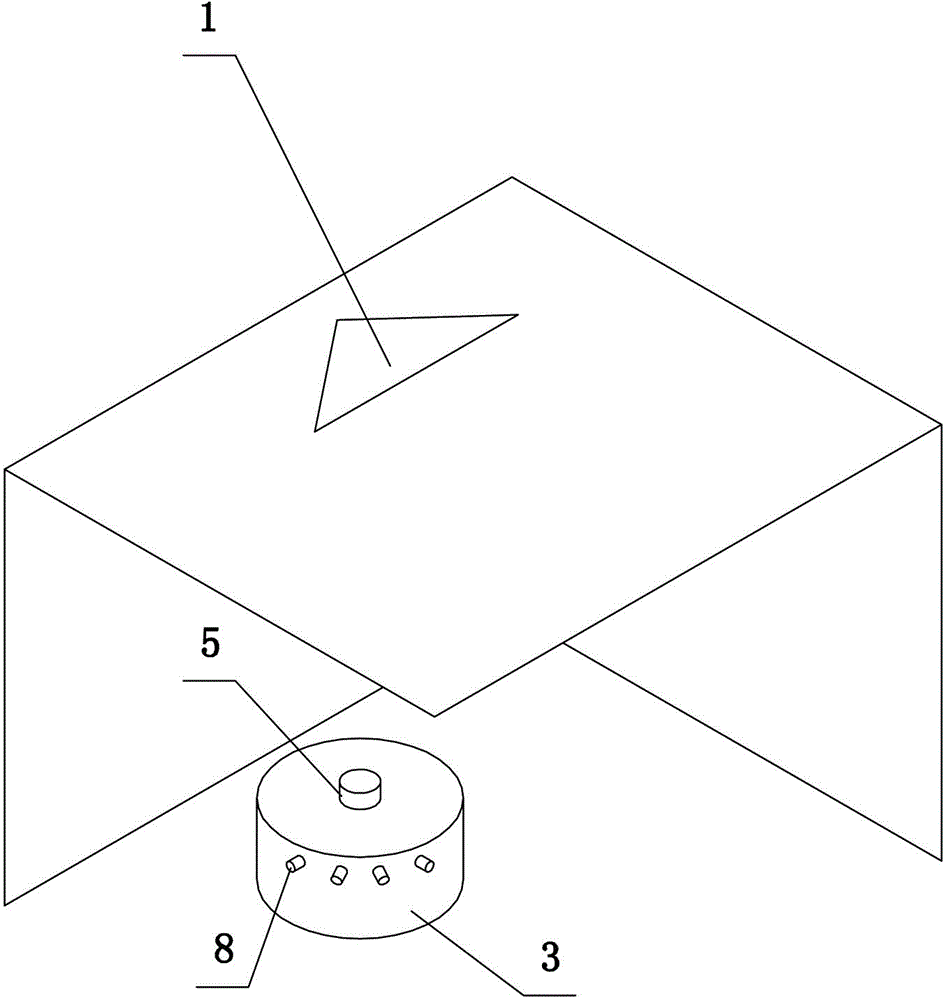
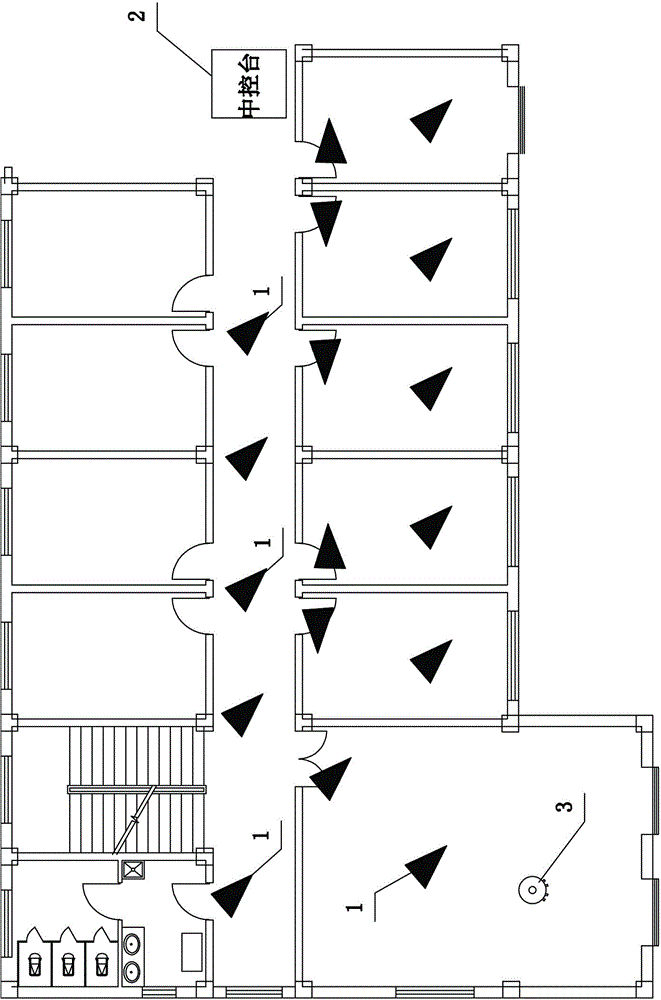
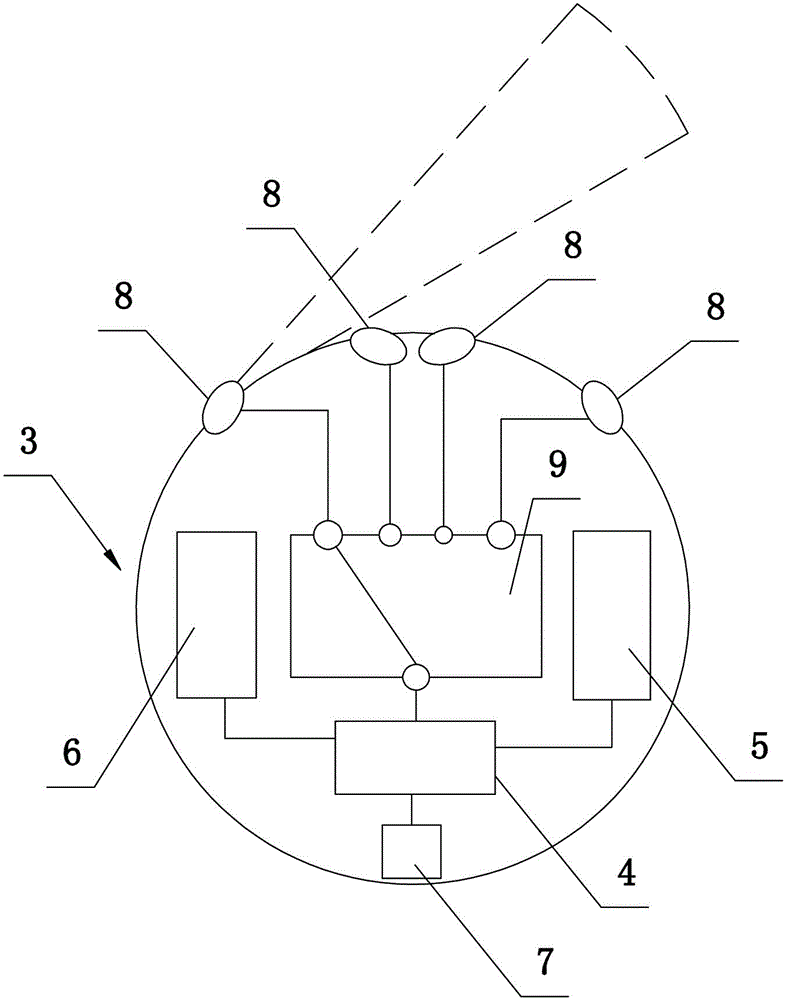
[0032] refer to Figure 1-Figure 6 . A walking control system for a robot, comprising a plurality of infrared light sources 1 arranged on the ceiling in each room or corridor, a wheeled robot 3 capable of identifying the infrared light source 1, and a robot for controlling the opening or closing of the infrared light source 1 The center console 2, the wheeled robot 3 can be used to shift from the first position to a plurality of different second positions, the infrared light source 1 is provided on the walking path from the first position to the second position, the The wheeled robot 3 includes a control unit 4, an identification unit 5 and an action unit 6, the enabling end of the control unit 4 is connected to the identification unit 5, and the enabling end of the action unit 6 is connected to the control unit 4, from the first A movement path is formed from one position to each second position, and the center console 2 forms a plurality of different infrared light source 1...
Embodiment 2
[0037] refer to Figure 1-Figure 6 . A walking control method for a robot, comprising the following steps, a. first arrange a plurality of infrared light sources 1 on the ceiling in each room or corridor in the room, and plan the wheeled robot 3 to walk according to the second position of different positions as required According to the needs of different moving paths, select the corresponding infrared light source 1 to turn on, so as to set a number of different infrared light source 1 light-emitting combinations and load them into the center console 2, one of the infrared The lighting combination of the light source 1 corresponds to control a moving path; b. When the user needs the wheeled robot 3 to shift from the first position to a second position, the center console 2 inputs instructions through the center console 2, and the center console 2 controls one group of infrared light sources 1 The light-emitting combination is turned on, and the other infrared light sources 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More