

Track tracking control method and device for vehicle autonomous parking
A trajectory tracking and autonomous parking technology, applied in control devices, vehicle components, transportation and packaging, etc., can solve the problems of high speed accuracy, stable control requirements, low precision, and failure to meet precision requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
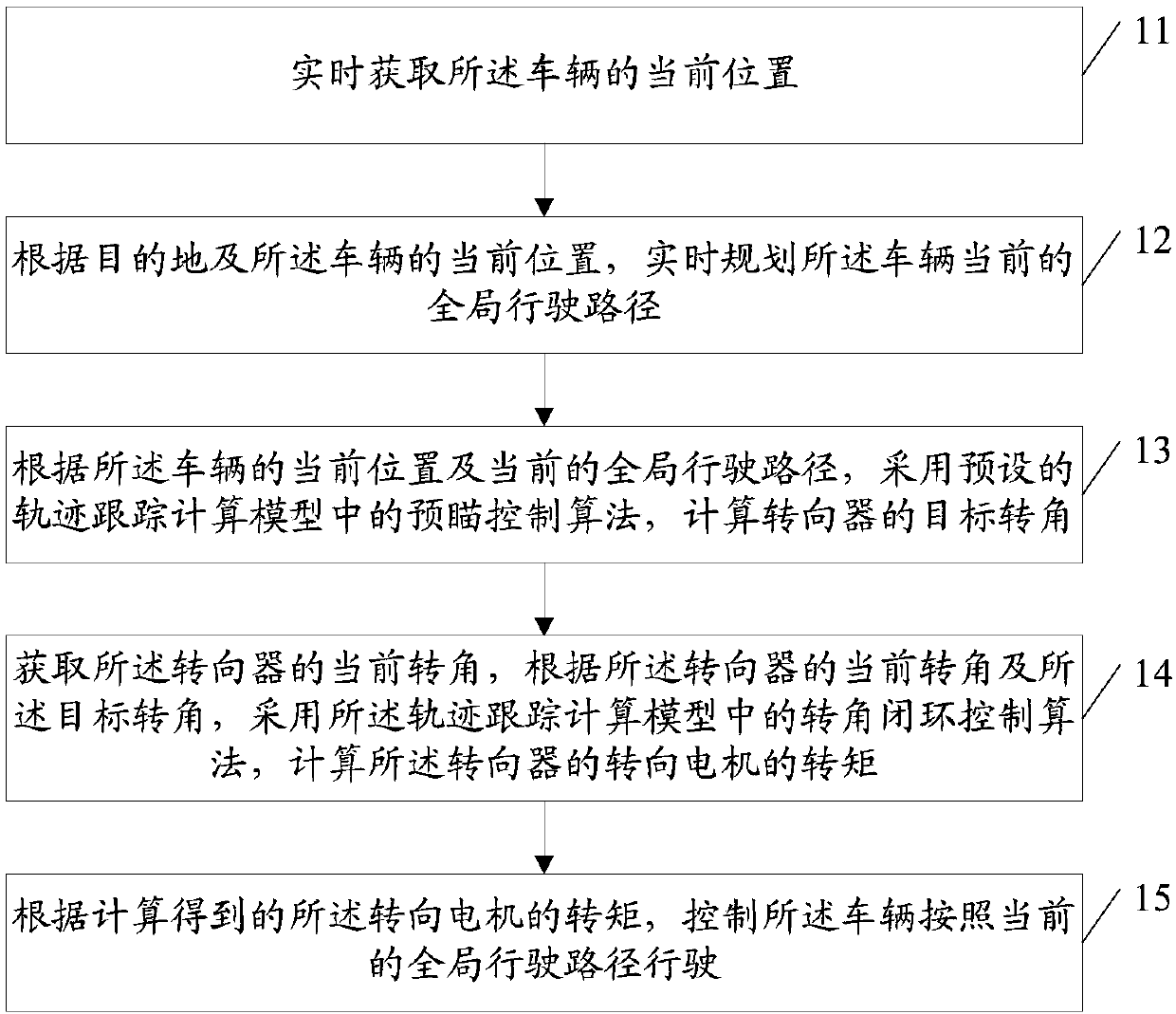
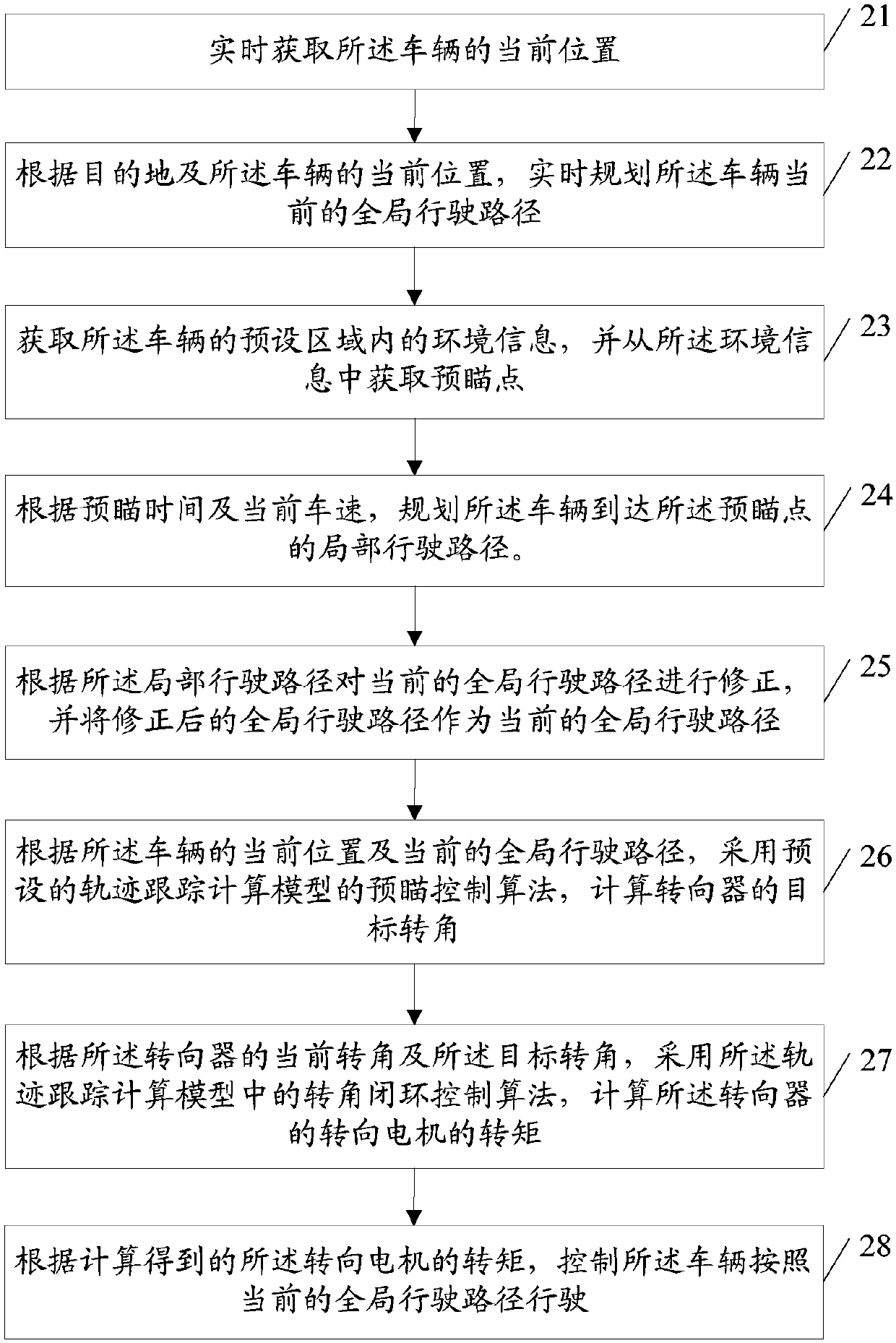
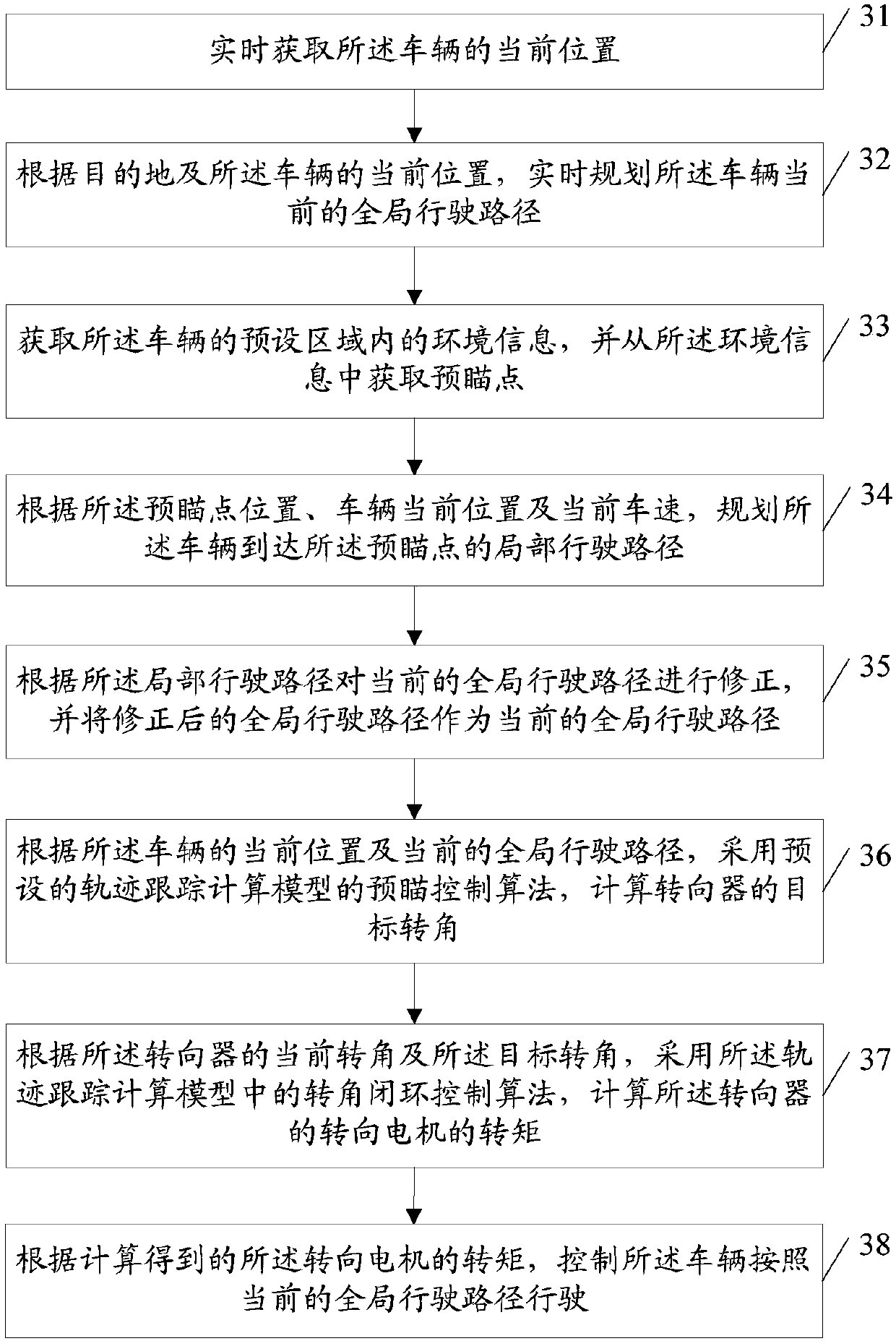
[0072] As mentioned above, the existing trajectory tracking control methods in the process of autonomous parking cannot meet the accuracy requirements of autonomous parking at extremely low speeds.
[0073] In order to solve the above problems, in the embodiment of the present invention, the target angle of rotation of the steering gear is calculated by using the preview control algorithm, and according to the target angle of rotation and the current angle of rotation, the closed-loop control algorithm of the angle of rotation in the trajectory tracking calculation model is used to calculate the steering angle. The torque of the steering motor of the controller enables the vehicle to accurately follow the planned global driving path, thereby improving the trajectory tracking accuracy of the vehicle's autonomous parking process.
[0074] In order to make the above objects, features and beneficial effects of the present invention more comprehensible, specific embodiments of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More