A kind of preparation method of bionic intelligent flexible actuator
A flexible drive, bionic technology, applied in the field of materials, to achieve the effect of low preparation cost, high-efficiency movement form, and rapid swelling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
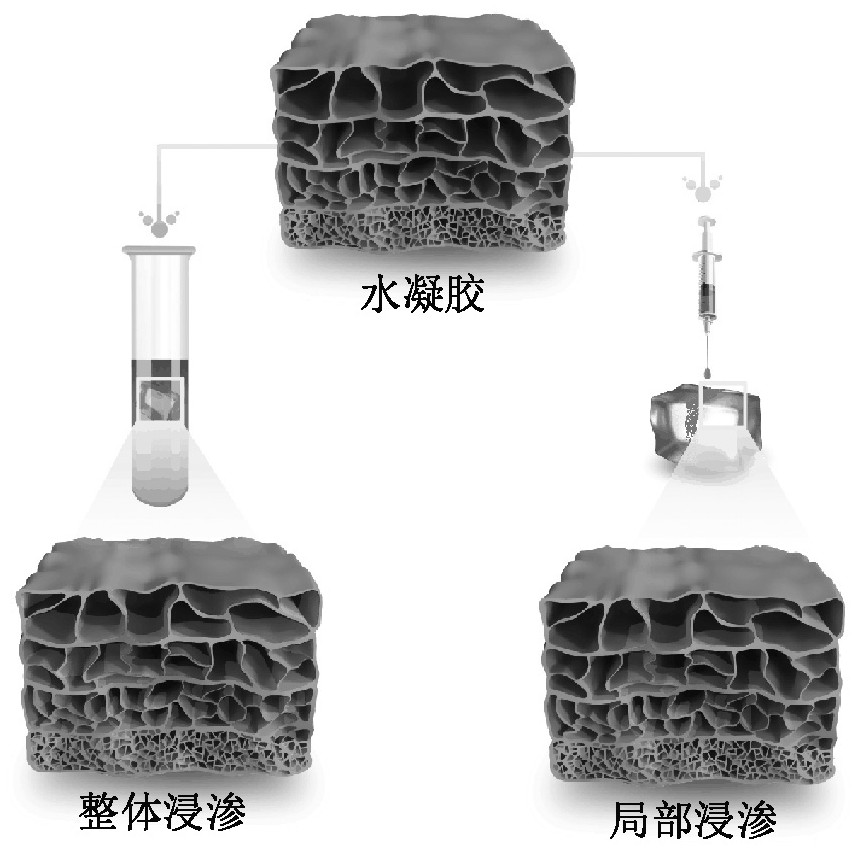
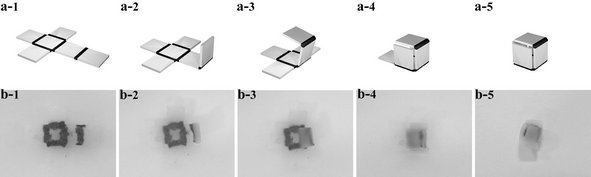
[0022] see figure 1 and figure 2 As shown, the "carton" type bionic intelligent flexible actuator is prepared by "partial impregnation" method:
[0023] N-isopropylacrylamide was selected as the monomer, 4-hydroxybutyl acrylate was used as the crosslinking agent, ammonium persulfate was used as the initiator, graphene oxide was used as the photothermal conversion agent, and 808nm near-infrared laser was used as the control source. The mass of the monomer is 1g-2g; the volume of the cross-linking agent is 200μL-400μL; the quality of ammonium persulfate is 10mg-20mg, and the concentration of the graphene oxide aqueous solution is 4mg / mL-5mg / mL. Add the monomer and initiator into distilled water, and fully dissolve under the stirring action of a magnetic stirrer, then add the crosslinking agent, then stir for 5min~6min, filter, put it into the reaction kettle, and react under the condition of 190℃~200℃ After 5-6 hours, cut the prepared hydrogel into a cross shape, and use filt...
Embodiment 2
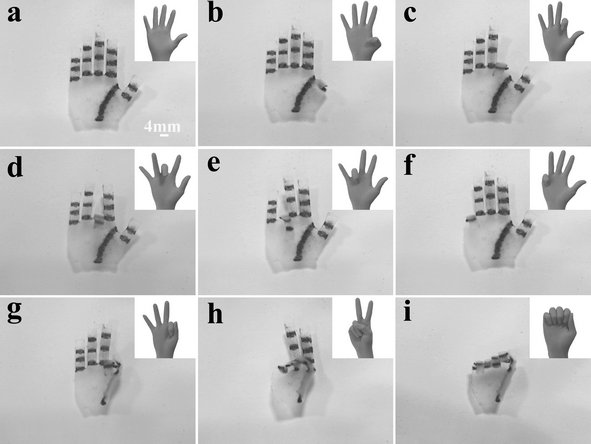
[0025] see figure 1 and image 3 As shown, the "palm" type bionic intelligent flexible actuator was prepared by the "partial impregnation" method
[0026] N-isopropylacrylamide was selected as the monomer, 4-hydroxybutyl acrylate was used as the crosslinking agent, ammonium persulfate was used as the initiator, graphene oxide was used as the photothermal conversion agent, and 808nm near-infrared laser was used as the control source. The mass of the monomer is 1g-2g; the volume of the cross-linking agent is 200μL-400μL; the quality of ammonium persulfate is 10mg-20mg, and the concentration of the graphene oxide aqueous solution is 4mg / mL-5mg / mL. Add the monomer and initiator into distilled water, and fully dissolve under the stirring action of a magnetic stirrer, then add the crosslinking agent, then stir for 5min~6min, filter, put it into the reaction kettle, and react under the condition of 190℃~200℃ After 5-6 hours, cut the prepared hydrogel into the shape of a palm, fully...
Embodiment 3
[0028] see figure 1 and Figure 4As shown, the "chrysanthemum" type bionic intelligent flexible actuator was prepared by the "integral impregnation" method
[0029] N-isopropylacrylamide was selected as the monomer, 4-hydroxybutyl acrylate was used as the crosslinking agent, ammonium persulfate was used as the initiator, graphene oxide was used as the photothermal conversion agent, and 808nm near-infrared laser was used as the control source. The mass of the monomer is 1g-2g; the volume of the cross-linking agent is 200μL-400μL; the quality of ammonium persulfate is 10mg-20mg, and the concentration of the graphene oxide aqueous solution is 4mg / mL-5mg / mL. Add the monomer and initiator into distilled water, and fully dissolve under the stirring action of a magnetic stirrer, then add the crosslinking agent, then stir for 5min~6min, filter, put it into the reaction kettle, and react under the condition of 190℃~200℃ After 5-6 hours, the prepared hydrogel sheet is fully absorbed w...
PUM
| Property | Measurement | Unit |
|---|---|---|
| mass | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More