

Robot leg
A robot and thigh technology, applied in the field of robotics, can solve problems such as the limited ability of hexapod robots to overcome obstacles, and achieve the effect of ensuring obstacle-surmounting requirements and speed requirements, large rotation angle, and large output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
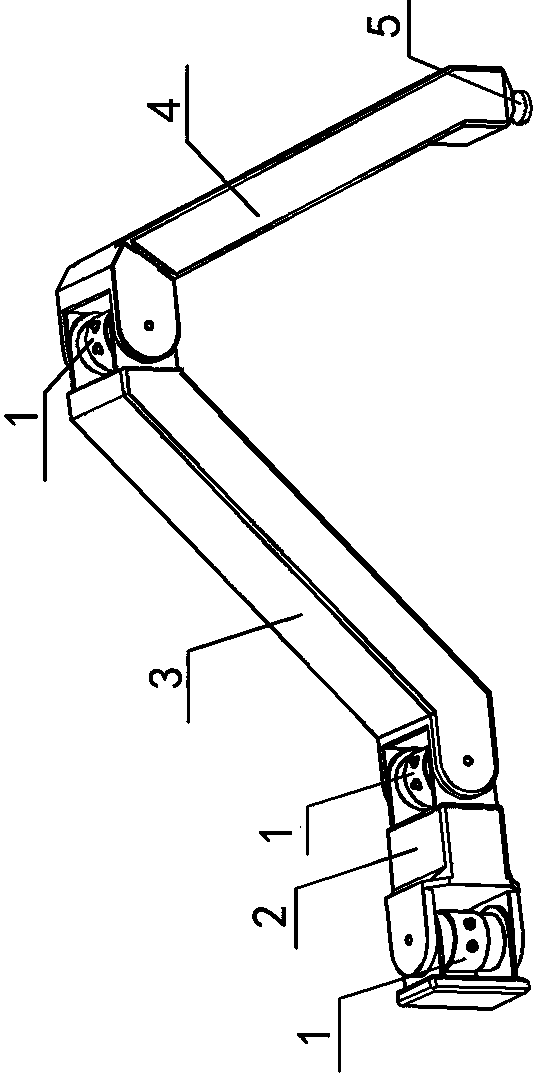
[0038] As shown in the figure, the hexapod robot leg of this embodiment includes a vane-type swing hydraulic motor, a robot lower leg, a robot thigh, and a robot base joint. In this embodiment, the end of the lower leg of the robot is provided with a shock-absorbing spherical joint.
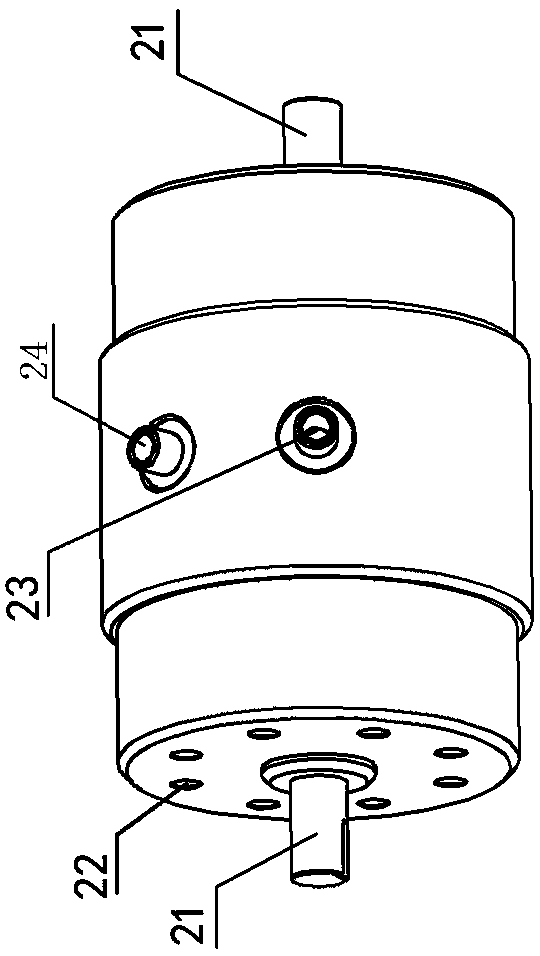
[0039] In this embodiment, the vane-type swing hydraulic motor includes a motor housing, a first hydraulic oil inlet and outlet, a second hydraulic oil inlet and outlet, a flange mounting hole provided on the motor housing, and two valves provided at both ends of the vane-type swing hydraulic motor. The output shaft, the first hydraulic oil inlet and outlet, and the second hydraulic oil inlet and outlet are respectively arranged on the motor housing. Based on this structure, by controlling the hydraulic oil input and output of the first hydraulic oil inlet and outlet and the second hydraulic oil inlet and outlet, the power output of the two output shafts can be controlled.
[0040] At the same t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More