

Multi-view pointer instrument identification method
A recognition method and pointer technology, applied in the field of image recognition, can solve the problems of difficult reading, slow manual reading, and manual reading cannot guarantee long-term monitoring, so as to solve the recognition problem and achieve the effect of improving the recognition effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
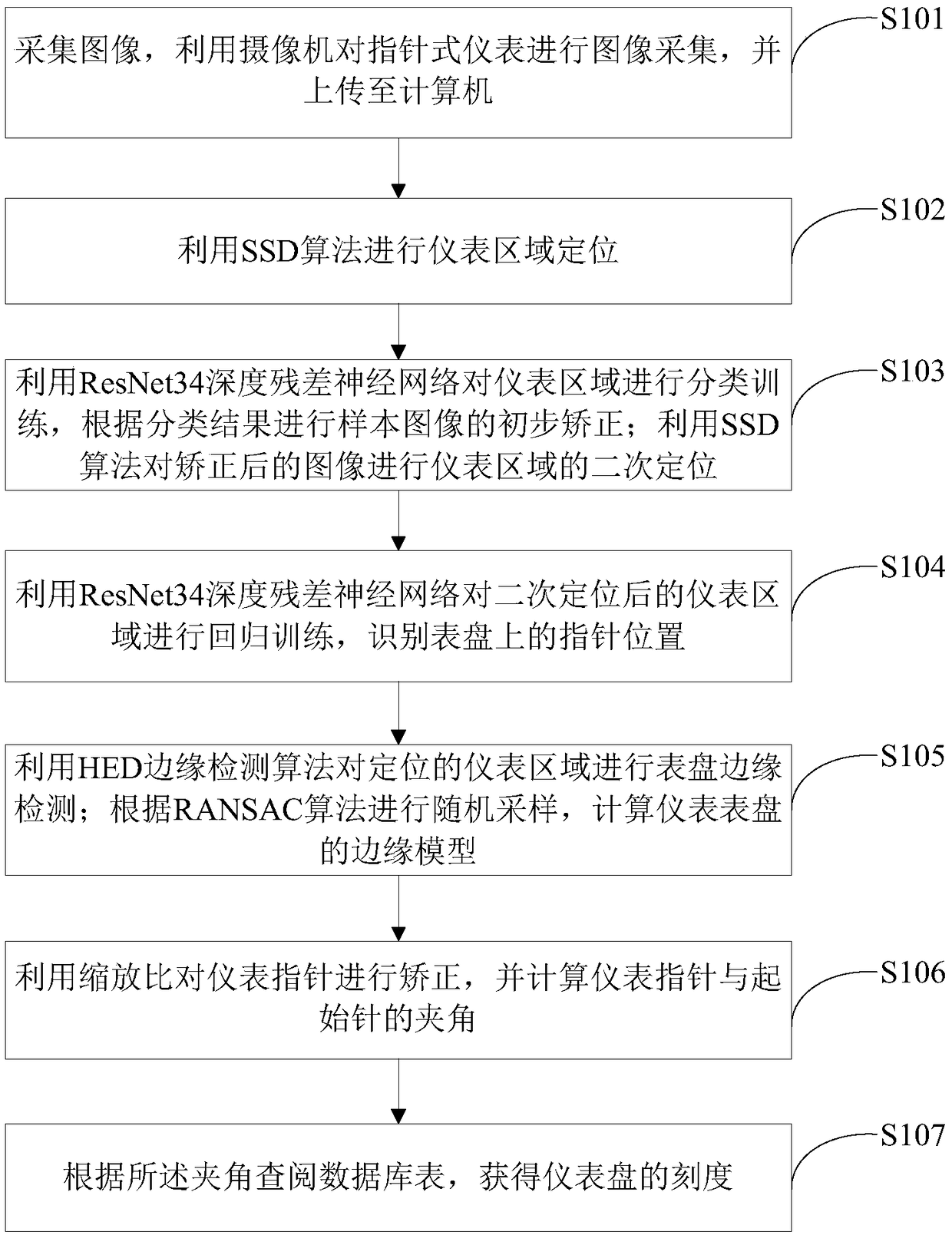
[0067] Such as figure 1 As shown, a multi-view pointer instrument recognition method of the present invention comprises the following steps:
[0068] Step S101: collecting images, using a camera to collect images of pointer instruments, and uploading them to a computer;
[0069] Step S102: use the SSD algorithm to locate the meter area;
[0070] Step S103: Use the ResNet34 deep residual neural network to perform classification training on the instrument area, and perform preliminary correction of the sample image according to the classification result; use the SSD algorithm to perform secondary positioning of the instrument area on the corrected image;
[0071] Step S104: use the ResNet34 deep residual neural network to perform regression training on the instrument area after the secondary positioning, and identify the position of the pointer on the dial;
[0072] Step S105: Use the HED edge detection algorithm to detect the dial edge of the positioned instrument area; perfo...
Embodiment 2
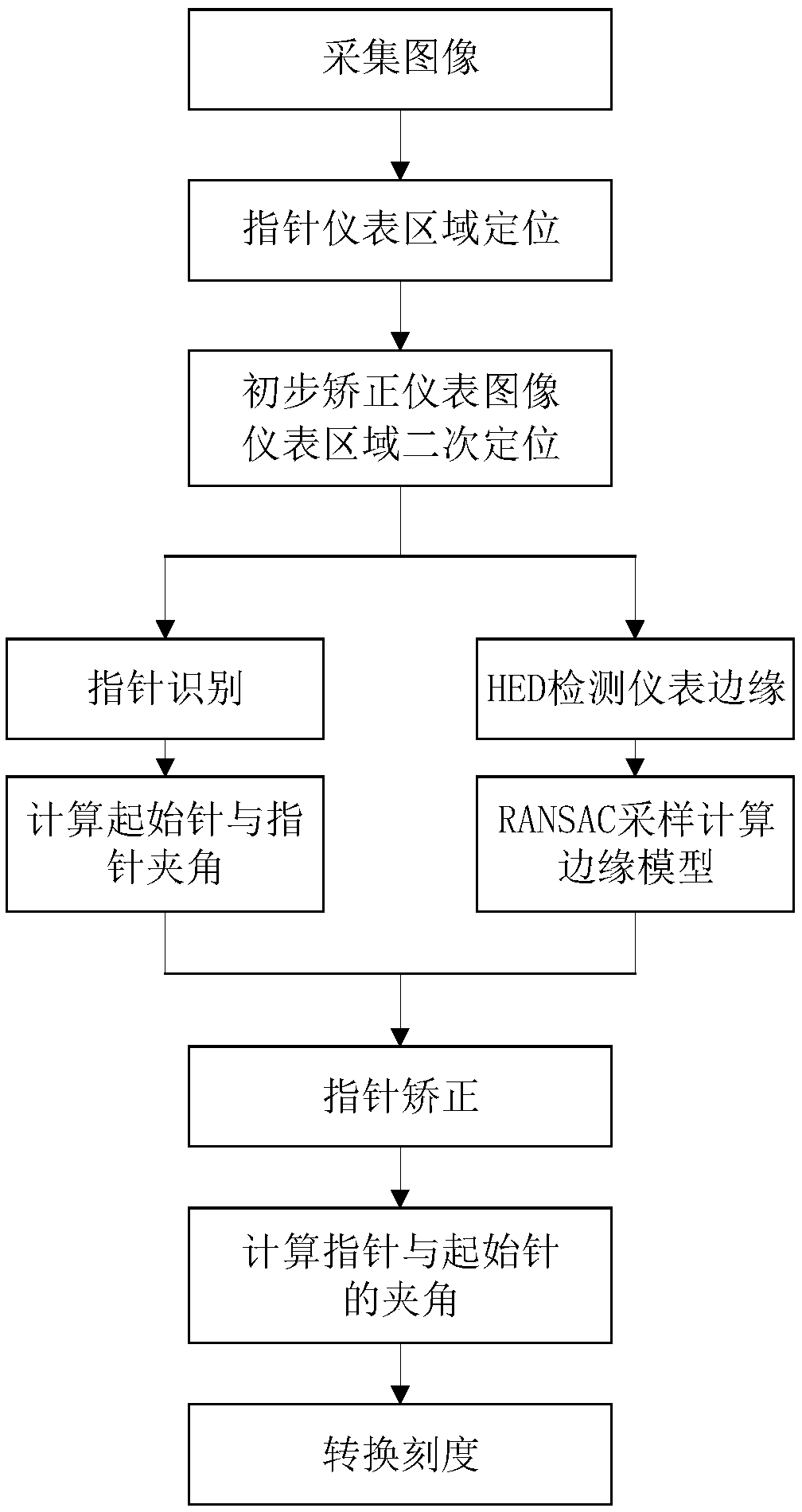
[0076] Such as figure 2 , image 3 As shown, another multi-view pointer instrument recognition method of the present invention includes the following steps:
[0077] Step 1: Collect images, use the camera to collect images of pointer instruments, and upload them to the computer.
[0078] Step 2: Position the pointer instrument area.
[0079] The SSD algorithm is used to locate the meter area for the collected sample data, Figure 4 Locate the block diagram for the gauge area.
[0080] The specific implementation process is as follows:
[0081] 1) Preprocess the sample data to obtain sample data with a size of 300×300×3.
[0082] 2) Construct the SSD network model. On the basic network structure of VGG16, the fully connected layers of the 6th and 7th layers are converted into convolutional layers, and the feature map sizes are 38×38 and 19×19. Then add 3 convolutional layers and an average pooling layer, that is, the average pool layer, and the feature map sizes are 10×1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More