

UAV (Unmanned Aerial Vehicle) cluster obstacle avoidance method based on multi-target adaptive mutation pigeon-inspired optimization
An unmanned aerial vehicle, self-adaptive technology, applied in the direction of non-electric variable control, instrumentation, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
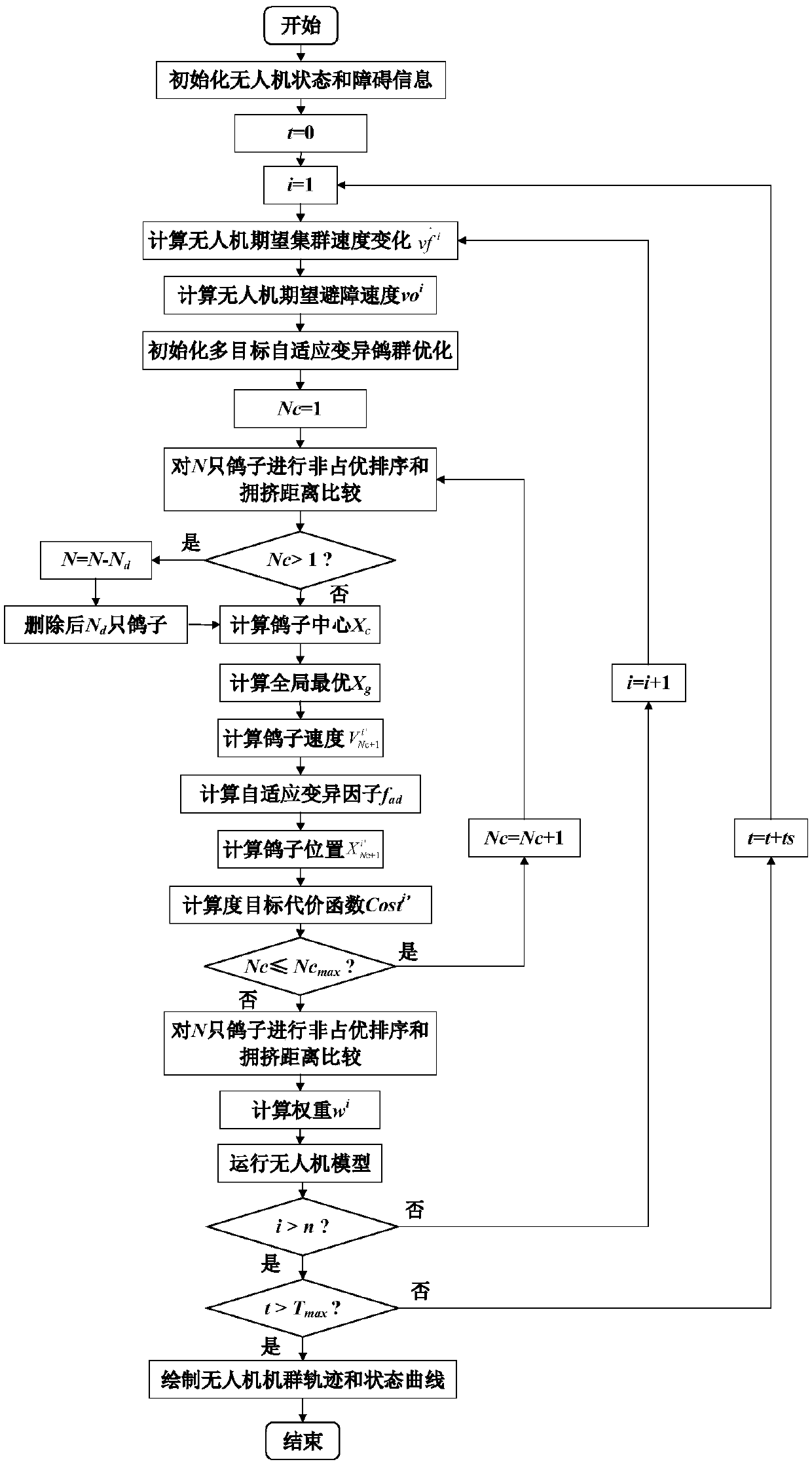
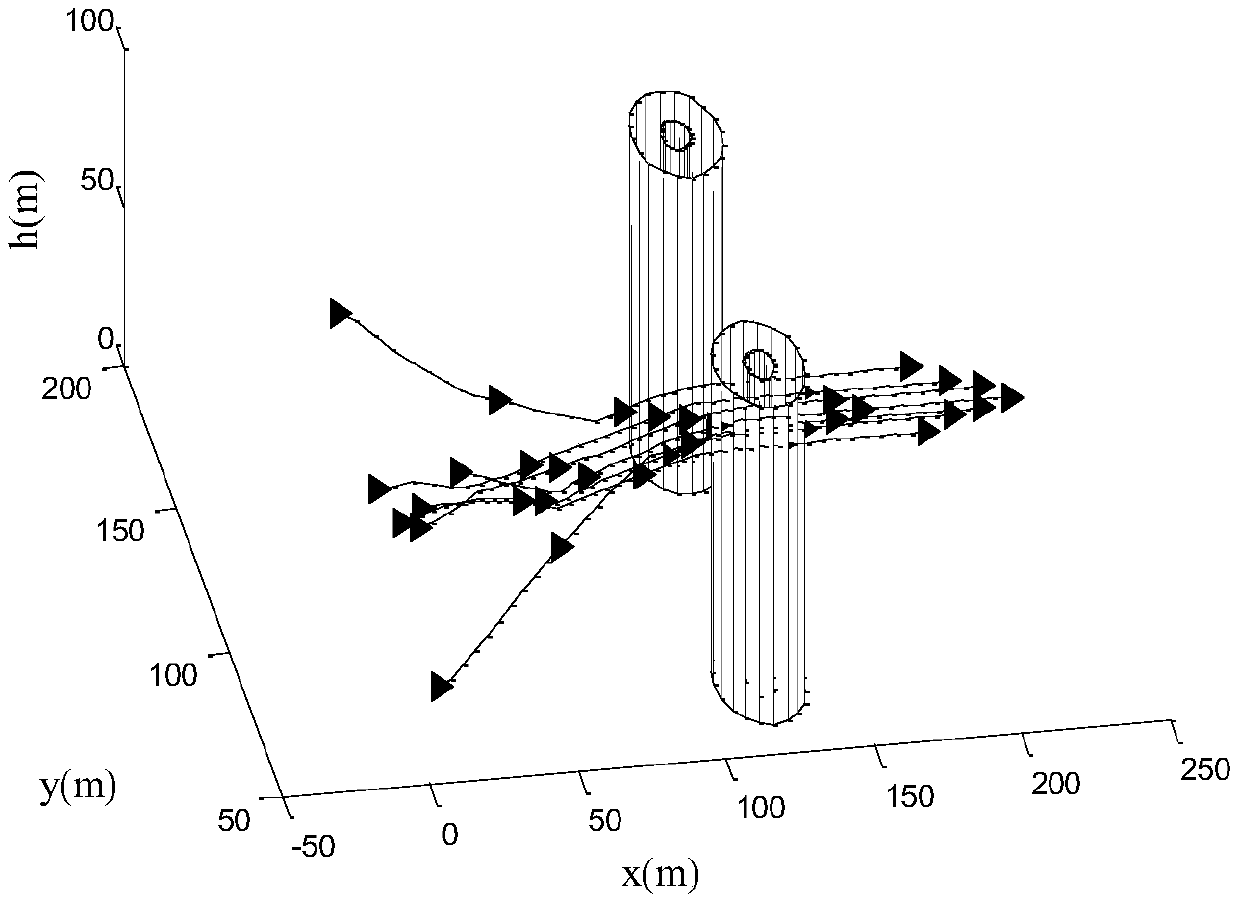
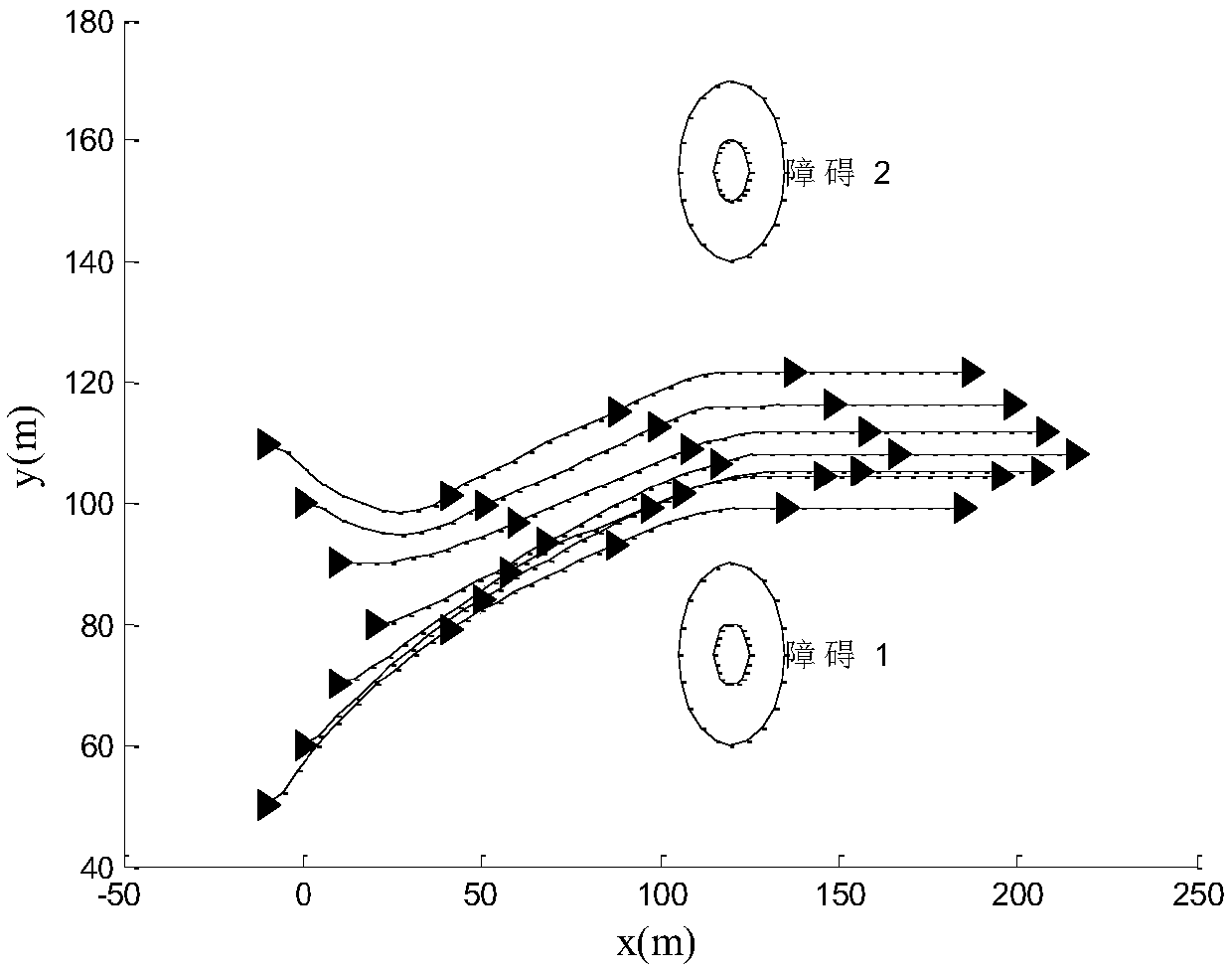
[0080] See Figure 1 to Figure 7 , the effectiveness of the method proposed in the present invention is verified below through a specific example of UAV swarm obstacle avoidance control. The experimental computer configuration is Intel Core i7-6700HQ processor, 2.60Ghz main frequency, 16G memory, and the software is MATLAB 2014a version. The specific steps of the method are as follows:
[0081] Step 1: Initialize
[0082] Generate the initial state of 7 drones, that is, the initial position P of drones 1 to 7 1 to P 7 Respectively (20m, 80m, 69.2665m), (10m, 90m, 43.6688m), (10m, 70m, 11.5694m), (0m, 100m, 47.4858m), (0m, 60m, 77.5678m), (-10m ,110m,94.6116m) and (-10m,50m,82.8438m), the initial horizontal velocity Initial heading angle ψ i =0rad, the initial height change rate λ i =0m / s, initial weight w i =[1,1], where UAV number i=1,2,...,7, maximum horizontal velocity V xy_max =15m / s, minimum horizontal speed V xy_min =5m / s, maximum overload n max =10g, acceler...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More