

Monocular optical flow-based potential obstacle detection method
A technology of obstacle detection and obstacle, which is applied in the field of drones, can solve the problems that the optical flow algorithm cannot meet the real-time detection requirements of drones, reduce the detection accuracy of the algorithm, and visually detect the environmental impact, etc., so as to improve the environmental perception ability , reduce the number of cameras, improve accuracy and real-time effects
Inactive Publication Date: 2018-11-16
UNIV OF ELECTRONICS SCI & TECH OF CHINA
View PDF14 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0002] In the process of detecting the forward depth information of the monocular eye flow, the detection environment of the traditional optical flow algorithm needs to meet the three prerequisites of constant brightness, consistent space and continuous time of the detection environment, while the random environment in the process of UAV power inspection Therefore, the traditional optical flow algorithm often cannot meet the requirements of real-time detection of drones in the autonomous line inspection environment.
[0003] In addition, the optical flow target detection and tracking algorithm is mainly to detect and track the full-frame cruising environment of the UAV. Complex environment detection will be accompanied by a huge amount of calculation and lengthy calculation time, which will reduce the detection accuracy of the algorithm in the environment, and is not suitable for Exploration of obstacles in the actual field environment
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0048] The technical solution of the present invention has been described in detail in the part of the summary of the invention, and will not be repeated here.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
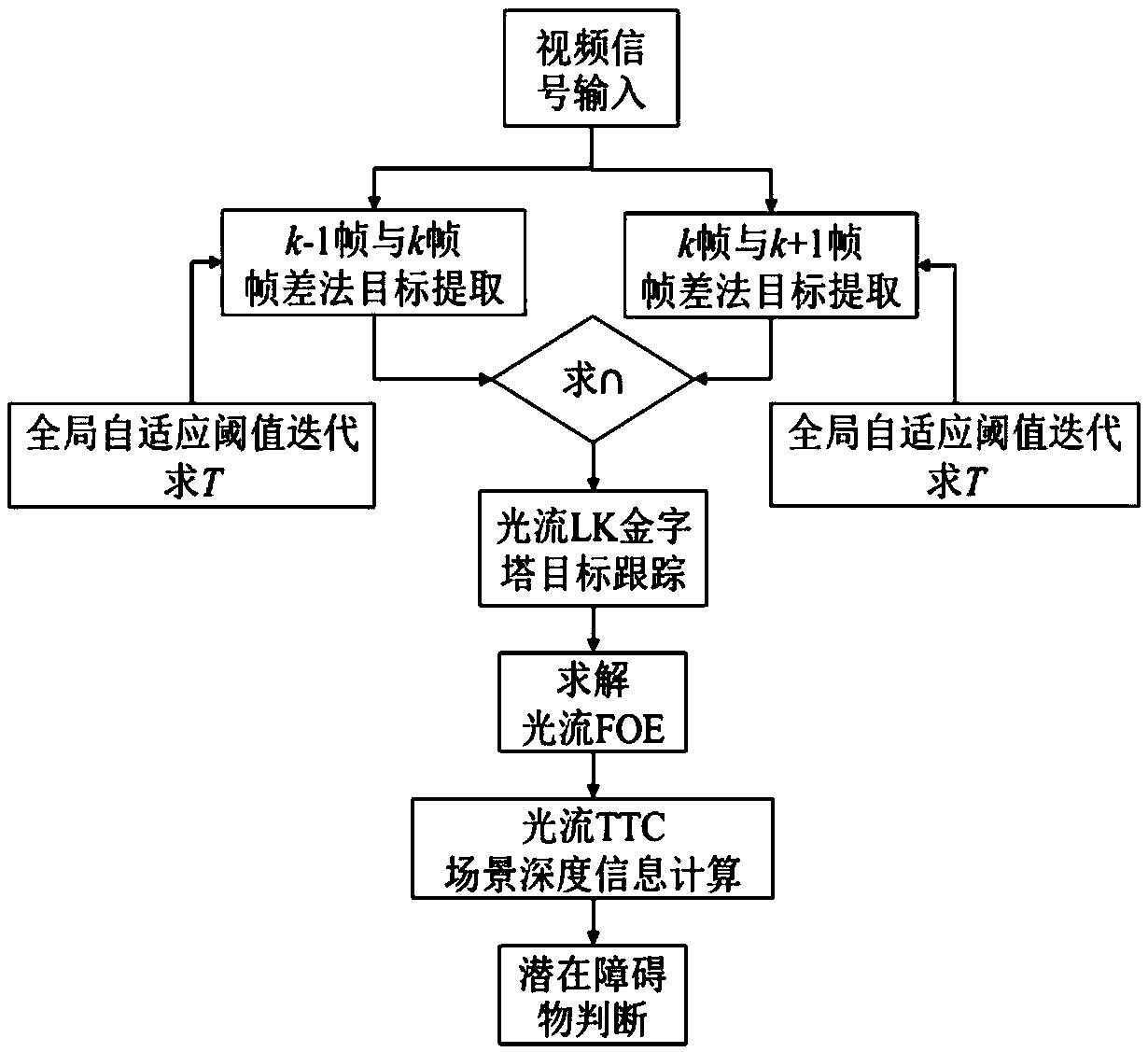
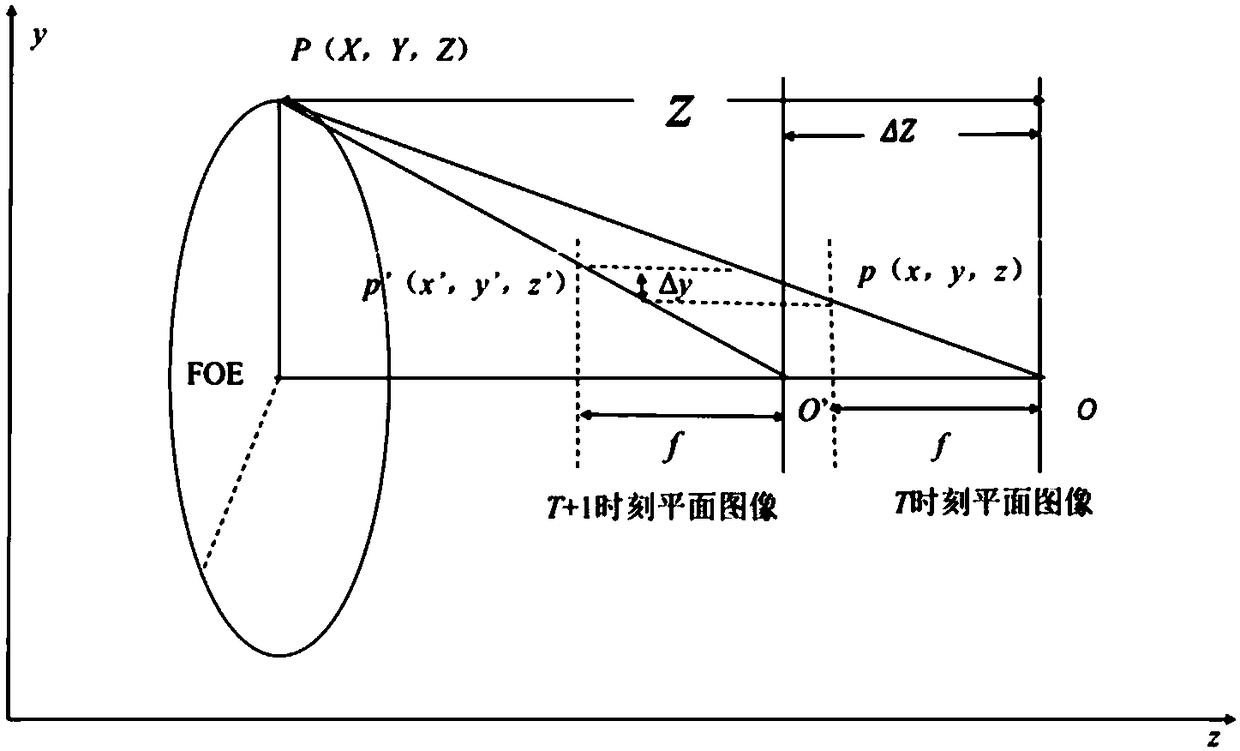
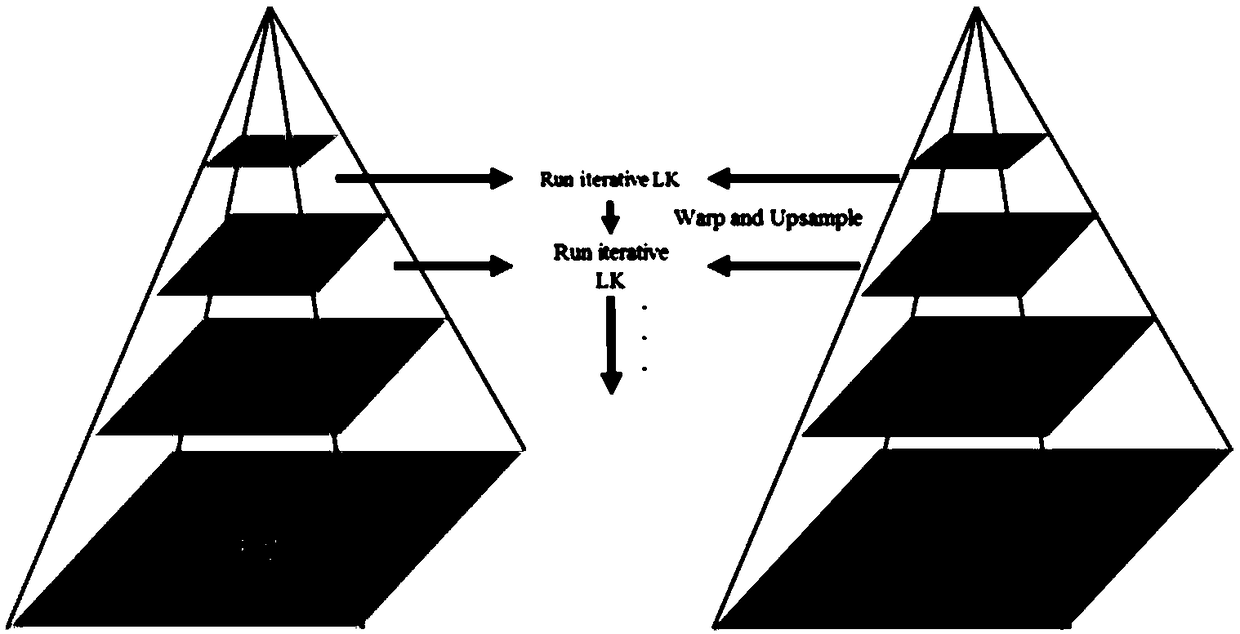
The invention belongs to the unmanned aerial vehicle technical field and relates to a monocular optical flow-based potential obstacle detection method. According to the method, an unmanned aerial vehicle is adopted to carry a sensor; an optical flow detection environment is simplified through a global adaptive iterative threshold and a frame difference method; the accuracy and real-time performance of target detection and tracking are improved through a pyramid model optical flow algorithm; a relative distance between the unmanned aerial vehicle and a detection angular point is estimated through optical flow FOE (Focus Of Expansion) and optical flow TTC (Time To Contact) calculation formulas. Compared with an existing visual ranging technology, the method of the invention can assist in reducing the number of cameras and saving cost. Compared with a traditional optical flow depth information detection algorithm, the method of the invention can assist in improving ranging accuracy and the environmental perception capacity of the unmanned aerial vehicle in an autonomous line inspection process, and can be widely applied to electric unmanned aerial vehicle line inspection.
Description
technical field [0001] The invention belongs to the technical field of unmanned aerial vehicles, and specifically relates to a potential obstacle detection method based on monocular visual flow. Background technique [0002] In the process of detecting the forward depth information of the monocular eye flow, the detection environment of the traditional optical flow algorithm needs to meet the three prerequisites of constant brightness, consistent space and continuous time of the detection environment, while the random environment in the process of UAV power inspection Therefore, the traditional optical flow algorithm often cannot meet the requirements of real-time detection of UAVs in the autonomous line inspection environment. [0003] In addition, the optical flow target detection and tracking algorithm is mainly to detect and track the full-frame cruising environment of the UAV. Complex environment detection will be accompanied by a huge amount of calculation and lengthy ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): G06K9/00G06T7/215G06T7/254G06T7/269G06T7/579
CPCG06T7/215G06T7/254G06T7/269G06T7/579G06T2207/30261G06T2207/10016G06T2207/20004G06V20/00
Inventor 叶润闫斌金钊
Owner UNIV OF ELECTRONICS SCI & TECH OF CHINA