

Binocular vision-based citrus picking robot and implementation method thereof
A picking robot and binocular vision technology, applied in the field of agricultural robots, can solve the problems of difficulty in adapting to the topography of citrus orchards, costing a lot of capital, and difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
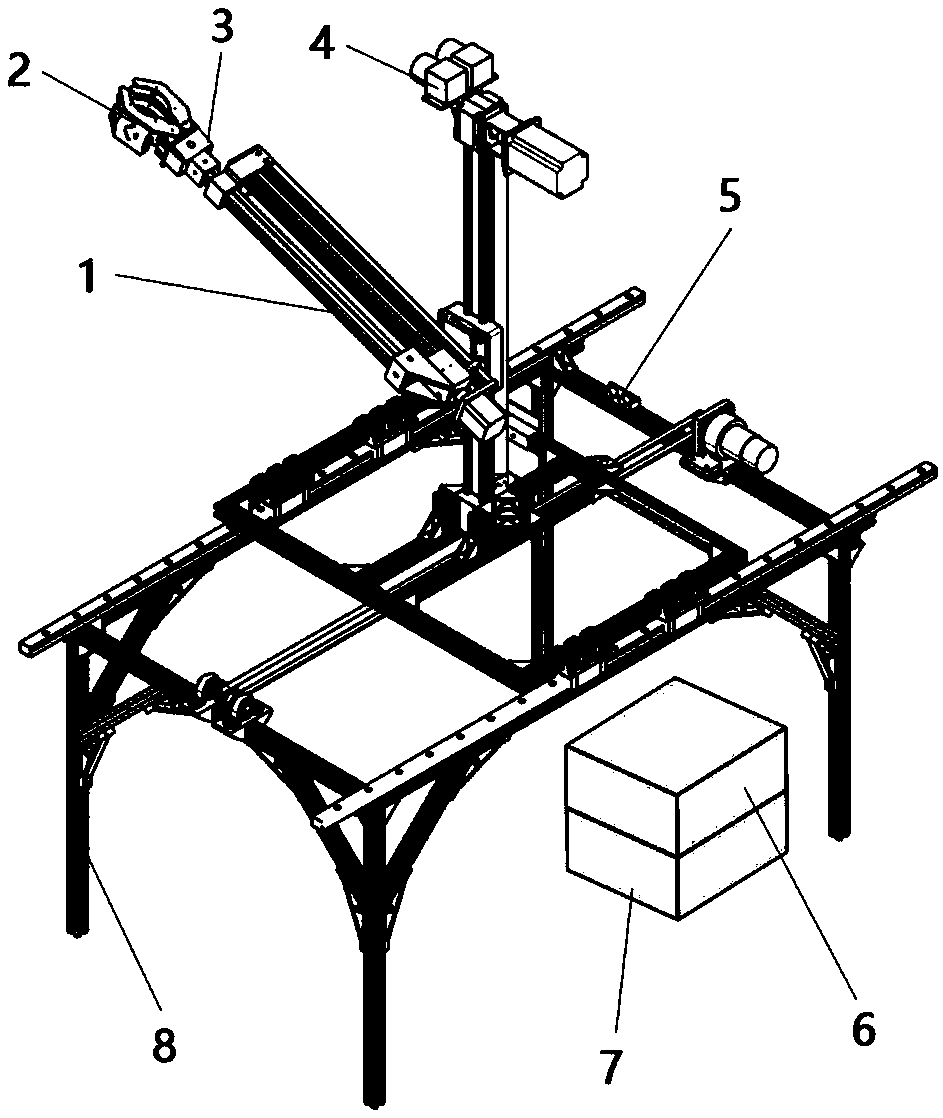
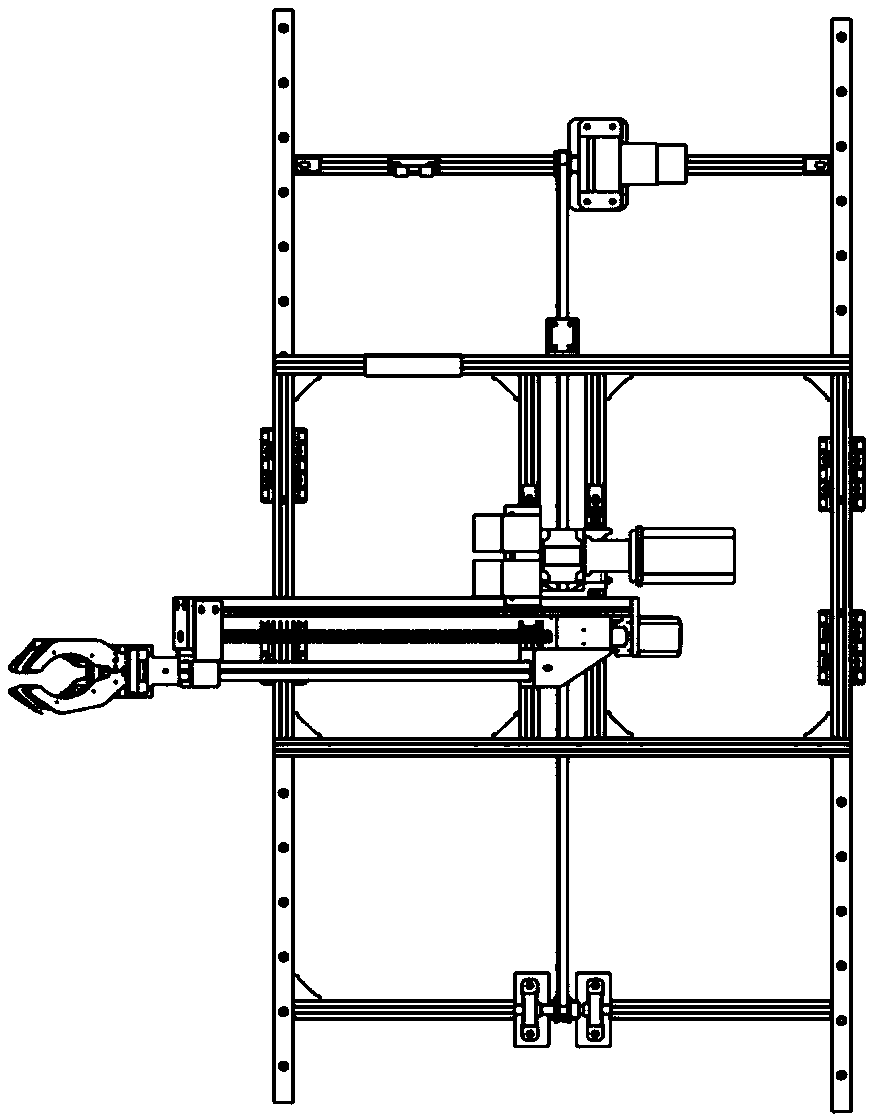
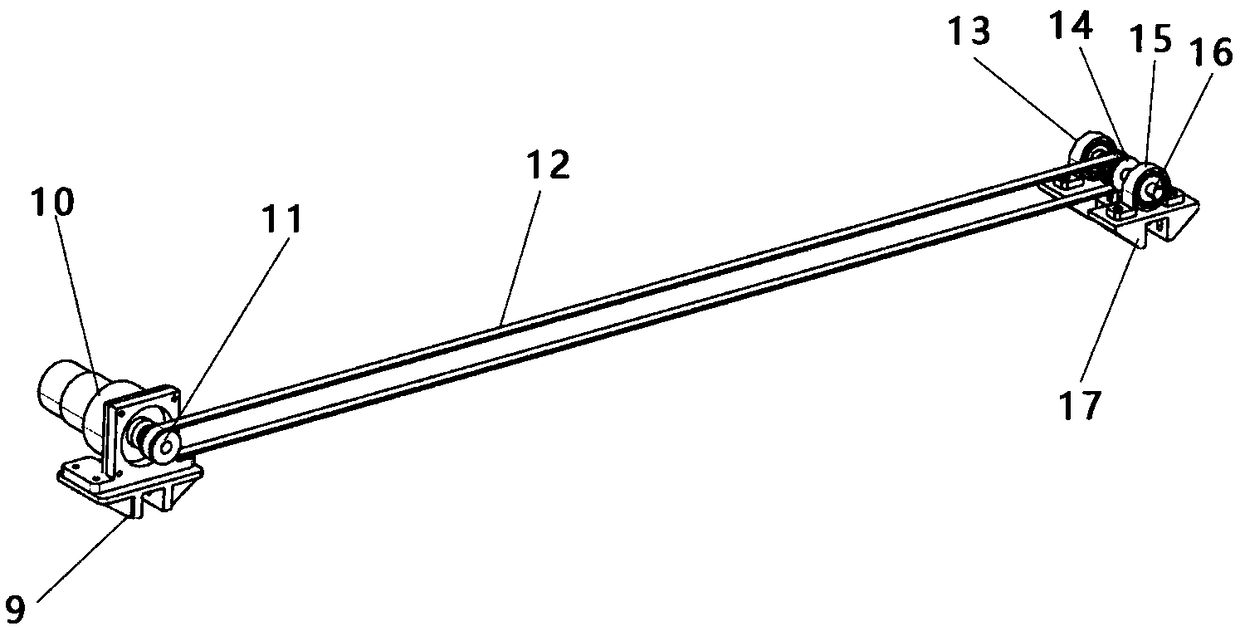
[0077] Such as figure 1 , figure 2 , Figure 11 , Figure 12As shown, a citrus picking robot based on binocular vision, the three-degree-of-freedom moving mechanism 1 is located on the base support mechanism 8 as a whole, and the three-degree-of-freedom moving mechanism 1 includes a moving platform 39, a synchronous belt linear module slide 18, a wire rod guide slide 28, such as image 3 Shown, mobile platform 39 is fixed on the upper end of synchronous belt 12 by synchronous belt fixture 33, as Figure 4 , Figure 10 As shown, the synchronous belt linear module slide table 18 is vertically fixed on the top of the mobile platform 39, and the lifting stepper motor 20 is located on the top of the synchronous belt linear module slide table 18, as Figure 5 As shown, the screw guide rail slide table 28 is connected with the synchronous belt linear module slide table 18 through the 3D printed lifting telescopic mechanism connector 30, as shown in Figure 7 As shown, it is at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More