

Caterpillar-imitated software robot based on SMA spring drive
A spring-driven, robotic technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of complex control, limited passing ability, lack of stability, flexibility and environmental adaptability, etc., to achieve good overall flexibility, strong The effect of flexibility and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
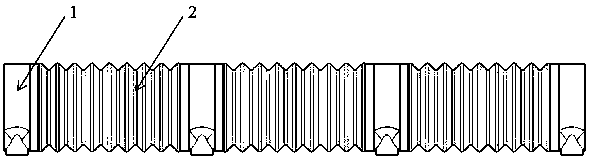
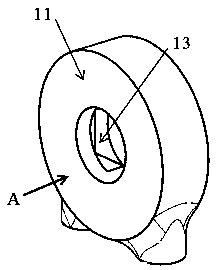
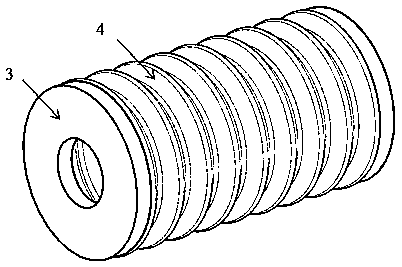
[0024] The invention relates to a caterpillar-like soft robot driven by an SMA spring, which adopts a modular design concept and consists of three drive modules (2) and four adsorption modules (1); the three drive modules (2) are arranged from left to right The sequence is respectively arranged between every two adsorption modules (1), and fixed by bonding, such as figure 1 As shown; the drive module is composed of four SMA springs one (12), two fixed plates (3) and a shell (4); the fixed plate (3) is bonded and fixed to the shell (4), and the four SMA The spring one (12) is evenly distributed in the casing (4) in para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More