

Gravity-change-driven lower-limb exoskeleton robot
An exoskeleton robot and a technology for changing the center of gravity, which is applied in the field of rehabilitation robots and can solve problems such as no power assistance and heavy weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings.
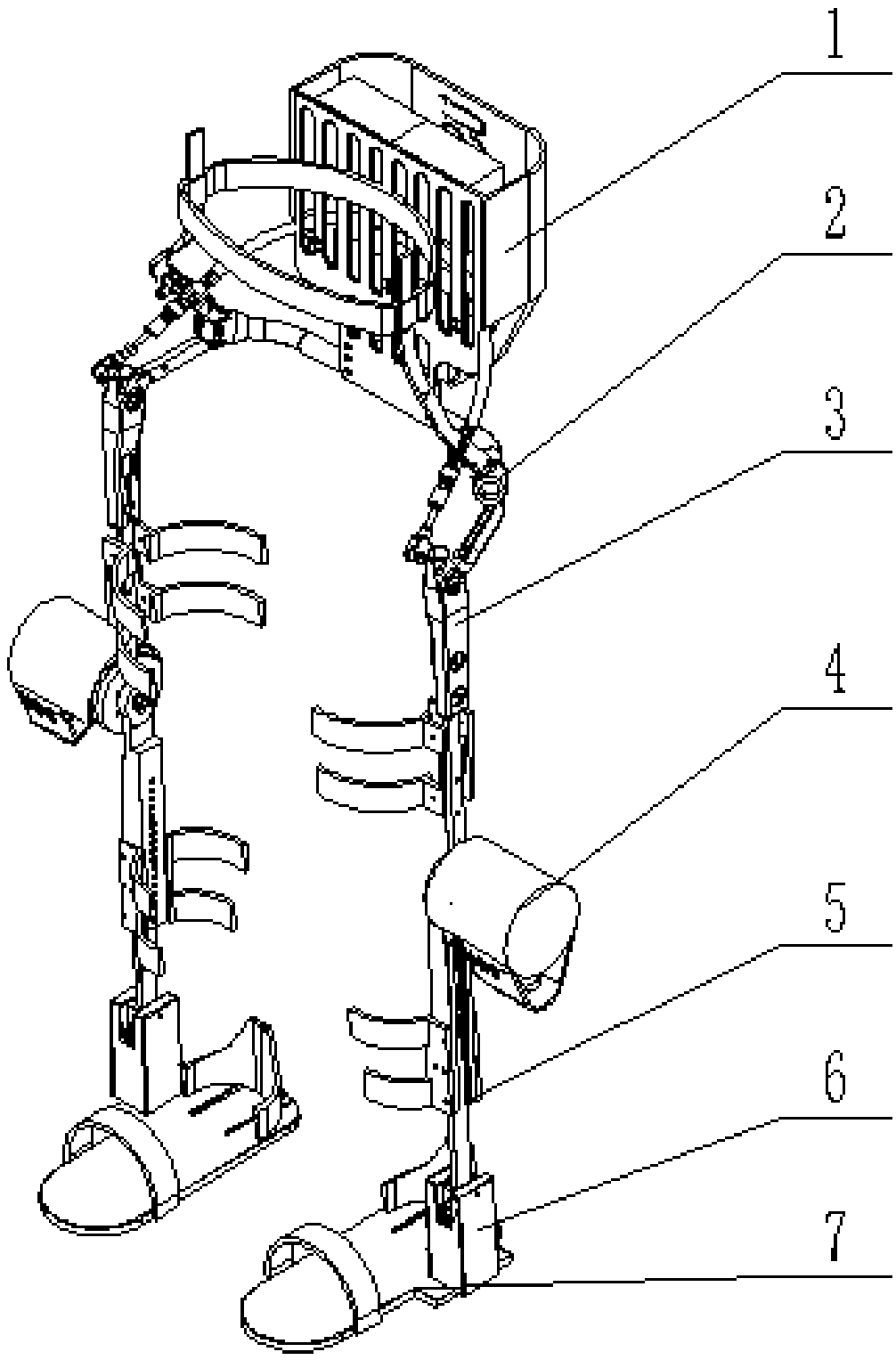
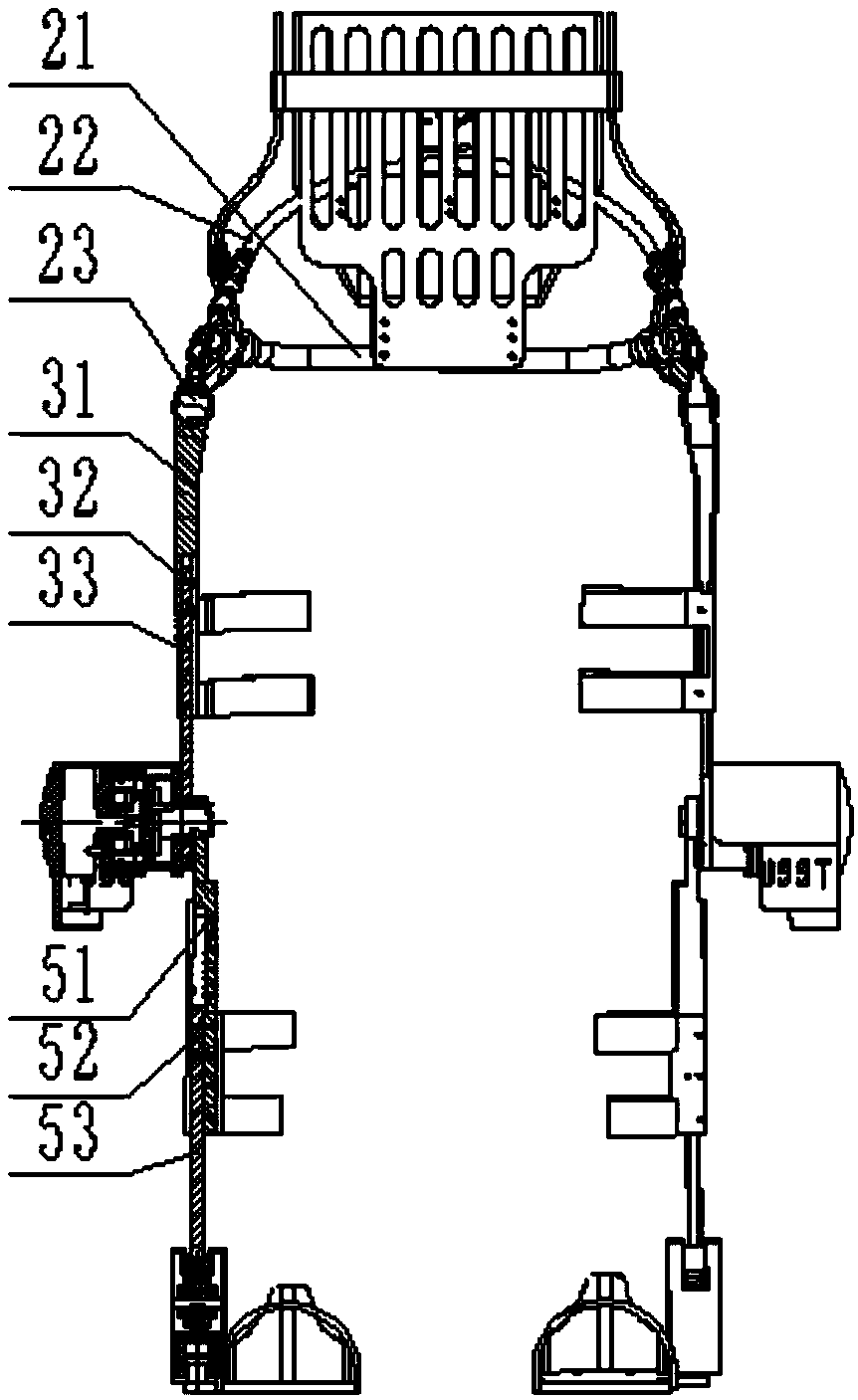
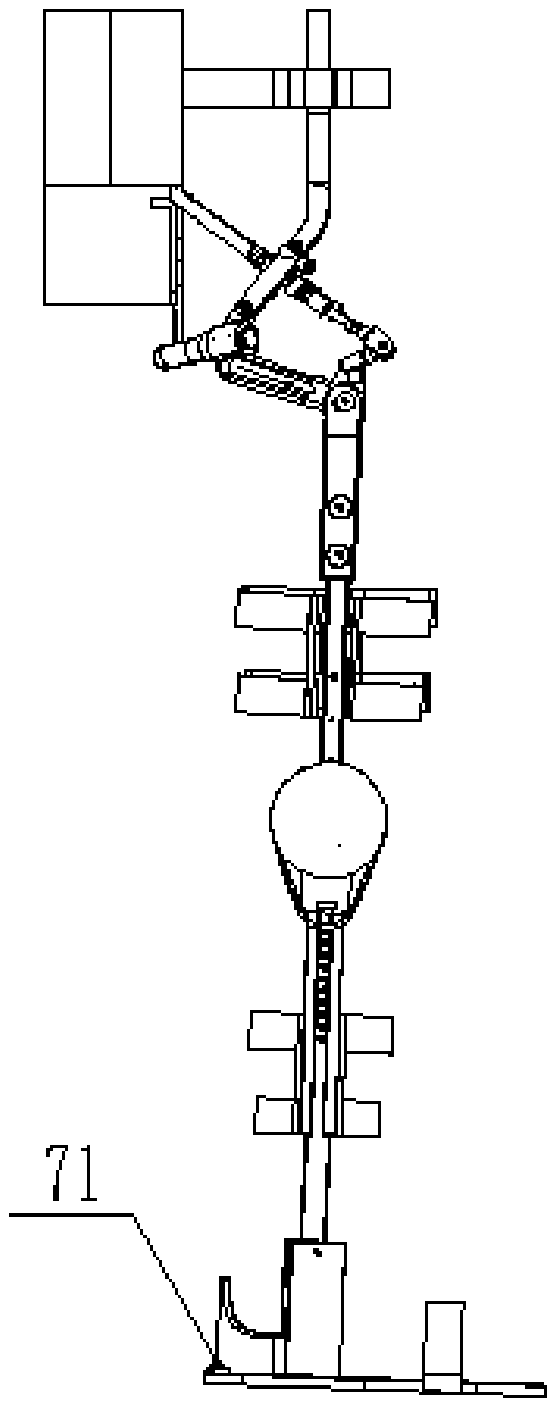
[0024] Such as Figure 1 to Figure 7 As shown, the lower extremity exoskeleton robot driven by the center of gravity change of the present invention includes a back module 1, a back support frame module 2, a thigh bar 3, a knee joint motor module 4, a calf bar 5, an ankle joint module 6 and a foot module 7.
[0025] A battery 11 , a driver 12 and a central processing unit 13 are installed in the back module 1 , and are fixedly connected with the back support frame module 2 . The back support frame module 2 includes a support frame 21 , a back cable 22 and a shaft 23 . The thigh rod 3 includes an upper rod 31, a screw 32 and a lower rod 33. The upper rod 31 is connected to the back support frame module 2 through the shaft 23, and the back cable 22 connects the left and right thigh rods 3 together, thereby The change of the center of gravity during walking is used t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More