

Soccer robot GGRRT path planning method
A football robot and path planning technology, applied in the direction of navigation calculation tools, etc., can solve the problems of prolonging the time of path search planning, the purpose of searching is not strong, and not having the strength to win, so as to shorten the planning time and improve the path. Search efficiency and avoid blindness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
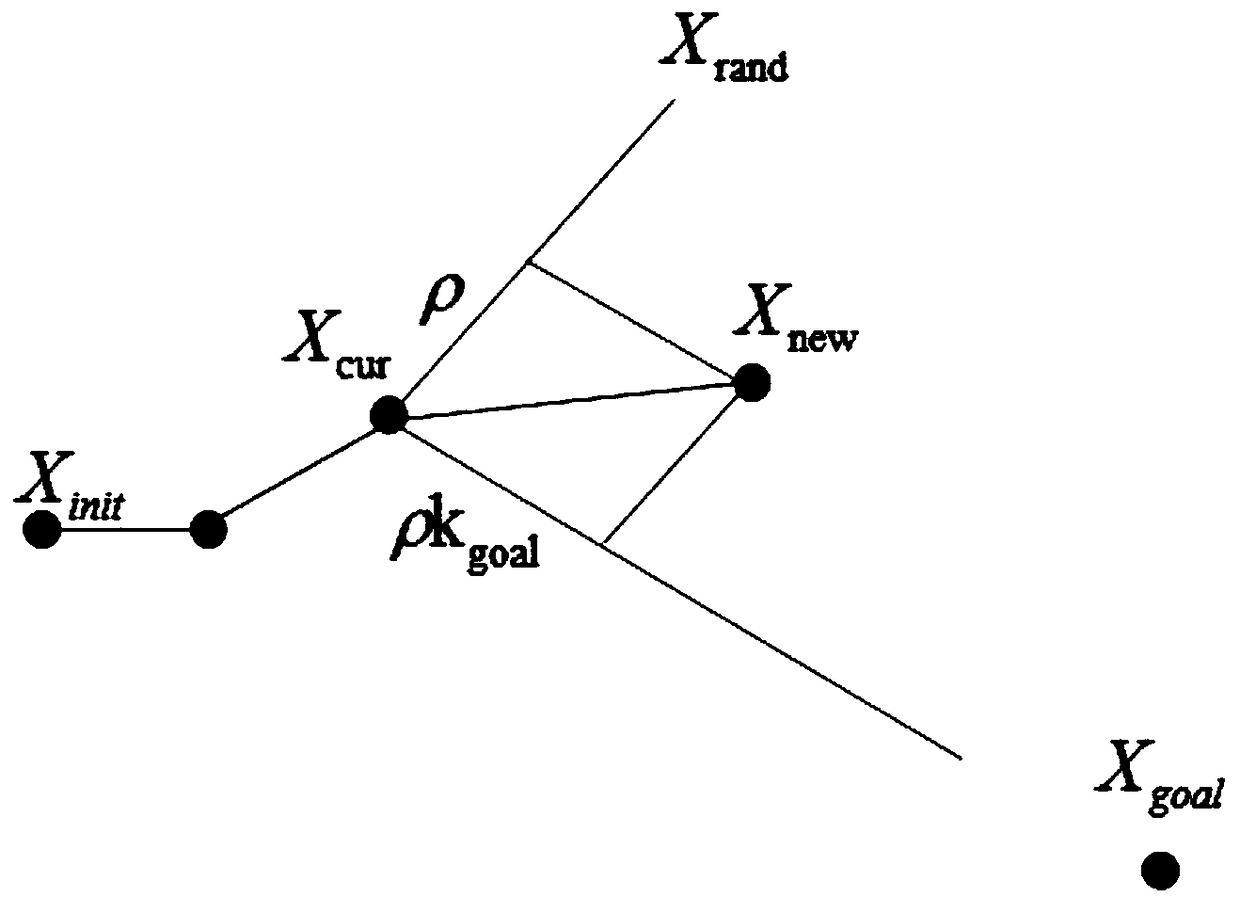
[0046] In the first step, the robot's current position coordinates are (nearestNode.posX, nearestNode.posY), and the node is used as the parent node to calculate the coordinates of its child nodes (tempNode.posX, tempNode.posY). Methods as below:
[0047] tempNode.posX=nearestNode.posX+(rrtStepSize*cosθ)+(kgoal*cosα)
[0048] tempNode.posY=nearestNode.posY+(rrtStepSize*sinθ)+(kgoal*sinα)
[0049] Among them, rrtStepSize represents the step size of the robot's movement. In the experiment, rrtStepSize=3, kgoal represents the target gravitational coefficient, in the experiment, kgoal=1, θ represents the angle between the connection line between the random node and the parent node and the x-axis, and α represents the target The angle between the connection line between the node and the parent node and the x-axis, the coordinates of the random node are (rand()%150+1, rand()%150+1).
[0050] The second step is to judge the validity of the child nodes (tempNode.posX, tempNode.posY)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More