

Acceleration control method and device for unmanned electric vehicle
An unmanned driving and acceleration control technology, applied in the field of pure electric vehicles, can solve problems such as endangering personal safety, danger of unmanned vehicles, acceleration is not ideal, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to have a clearer understanding of the technical features, objectives and effects of the invention, the specific embodiments of the invention will now be described with reference to the accompanying drawings.
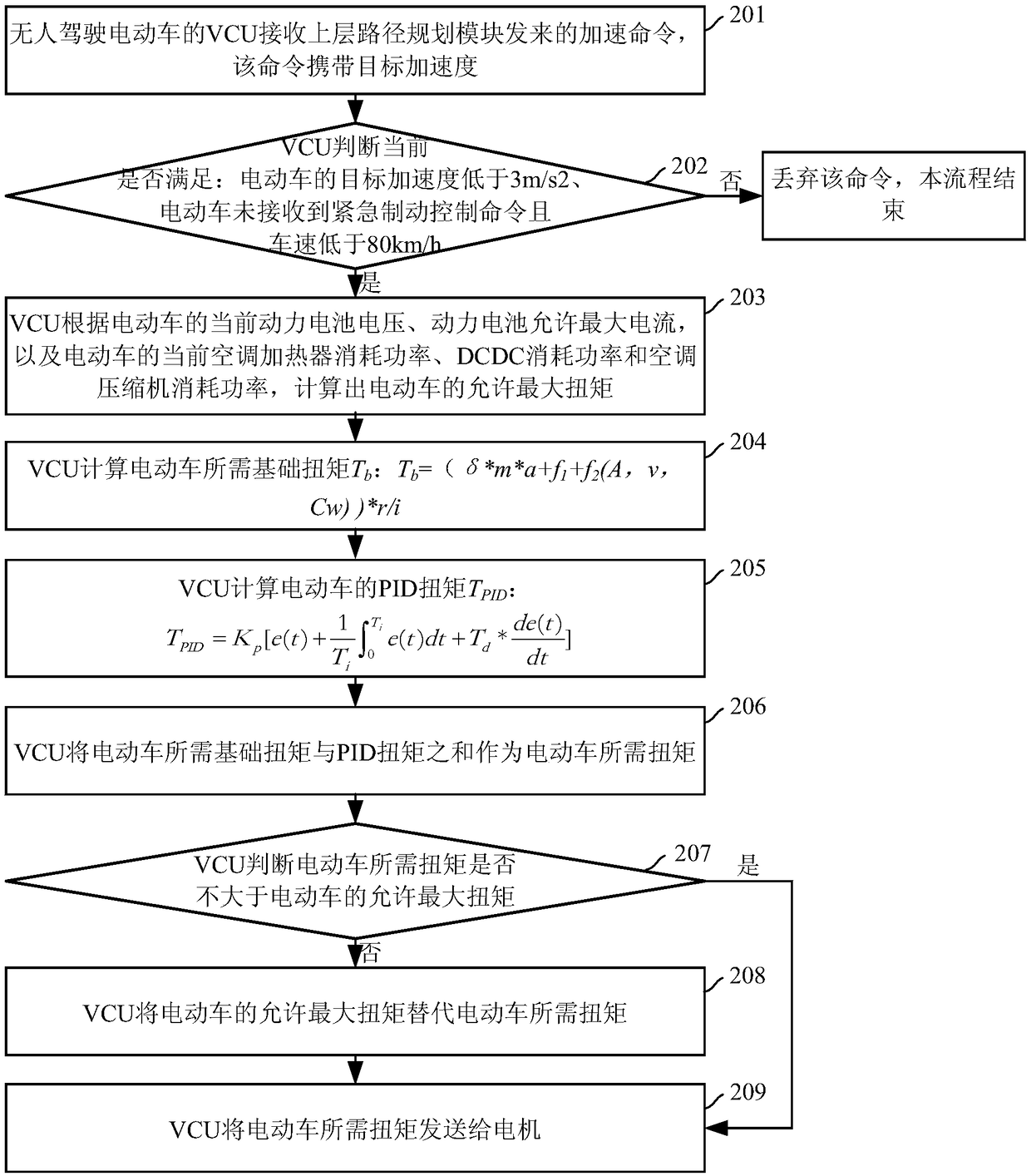
[0043] figure 1 It is a flowchart of an acceleration control method for an unmanned electric vehicle provided by an embodiment of the present invention. The specific steps are as follows:
[0044] Step 101: The VCU (Vehicle Control Unit, vehicle control unit) of the unmanned electric vehicle receives an acceleration command sent by the upper-level path planning module, and the command carries the target acceleration.
[0045] Step 102: The VCU judges whether it is currently met: the target acceleration of the electric vehicle is lower than the preset target acceleration threshold, the electric vehicle does not receive the emergency braking control command and the vehicle speed is lower than the preset vehicle speed threshold, if it is met, go to step 103; other...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More