Semi-automatic point cloud method for making three-dimensional high-definition road map lane line
A lane line, semi-automatic technology, applied in the semi-automatic point cloud field of making 3D high-definition road map lane lines, to achieve the effect of reducing data complexity and calculation costs, overcoming uncertainty, and reducing time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0058] Before describing this embodiment in detail, it should be pointed out that the semi-automatic point cloud method for making lane lines on a 3D high-definition road map provided by this embodiment is a semi-automatic method, using the roads in the 3D point cloud to create a road map .
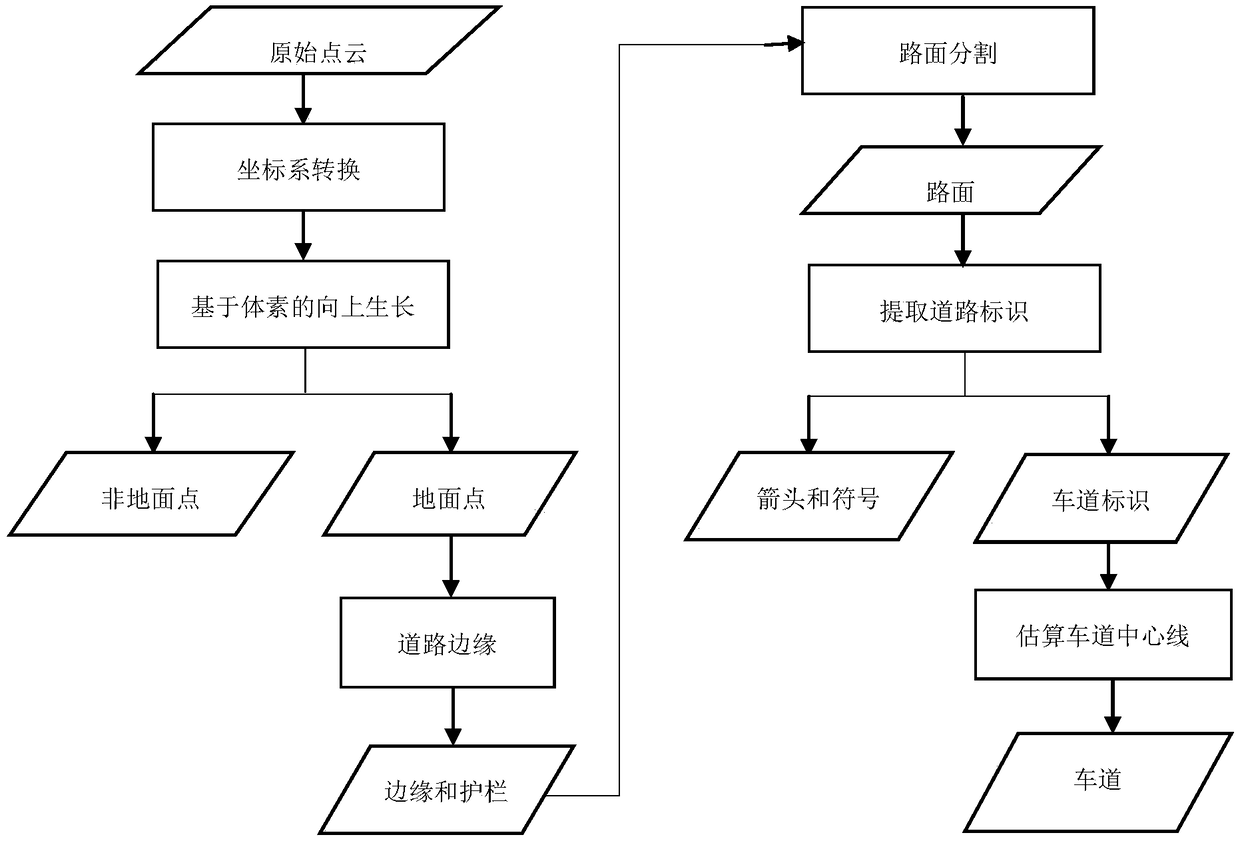
[0059] see figure 1 , the invention provides a semi-automatic point cloud method for making lane lines of a three-dimensional high-definition road map, comprising the following steps:
[0060] S1. Preprocessing, transforming the coordinate system and removing non-ground points on the point cloud data to obtain ground points.
[0061] This step is specifically implemented through the following steps:
[0062] S11. Coordinate system transformation. The MLS system utilizes a right-handed orthogonal coordinate system with an arbitrary user-defined orientation and origin. Such a random coordinate system makes it more difficult to plot the relative positions of points. To reduce the comple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More