Partially decoupled PRP parallel mechanism
A partial solution and parallel technology, applied in the field of robots, can solve problems such as difficult kinematic analysis and dynamic analysis, and achieve the effects of simple and stable structure, easy control and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
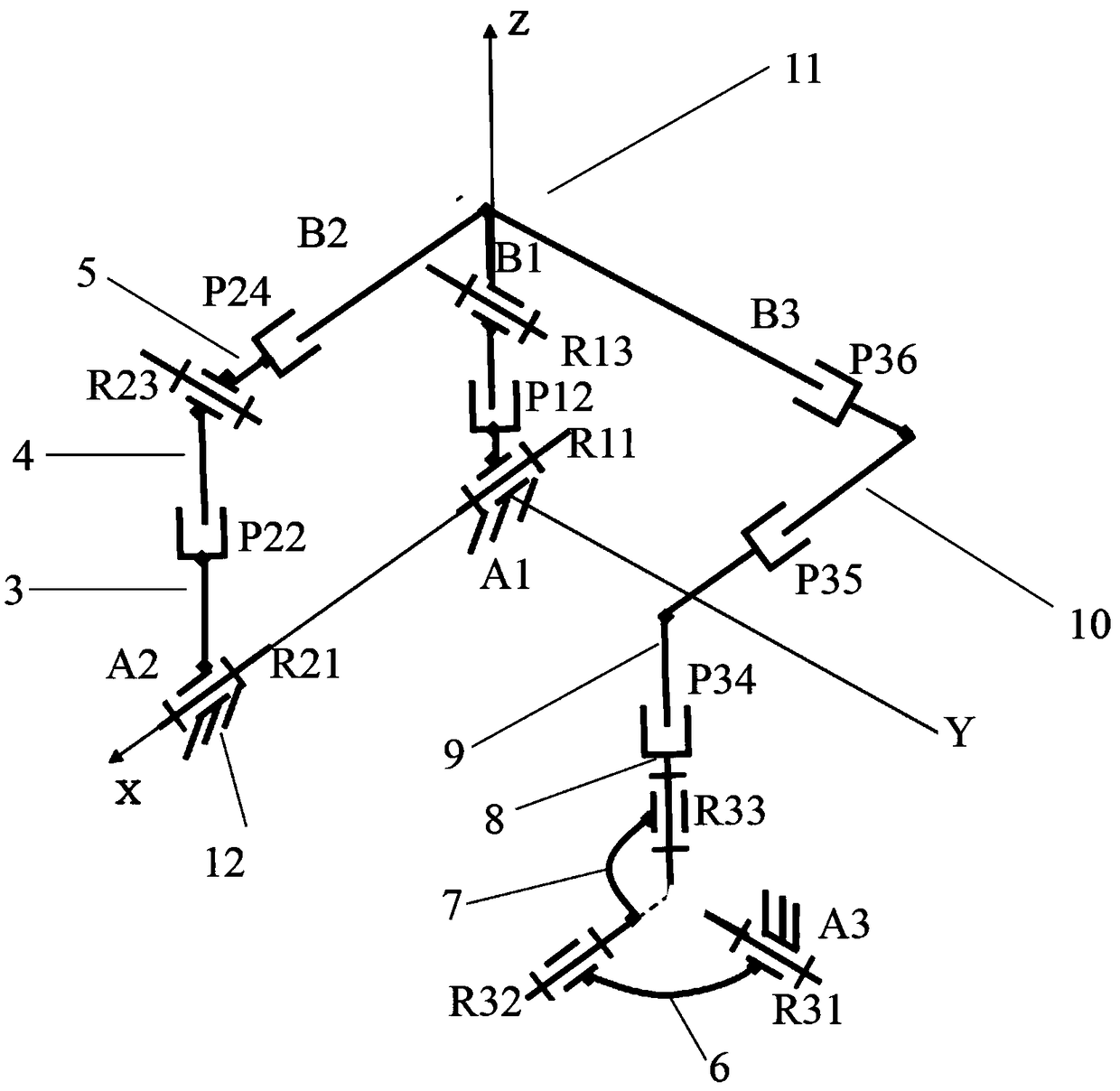
[0015] A partially decoupled RPR parallel mechanism of the present invention includes a fixed platform 12 and a moving platform 11, and the fixed platform 12 is connected to the moving platform 11 through three branch chains respectively.
[0016] The fixed platform 12 is composed of A1, A2 located in the X axis direction, and a general position A3, and the axes of the movable platform 11 where B1, B2 and B3 are located are located in the Z, X and Y axis directions respectively.
[0017] The first branch chain includes a rotating pair R11 connected to the A1 point in the fixed platform 12, the rotating pair R11 is connected with one end of the connecting rod a1, the other end of the connecting rod a1 is connected with one end of the moving pair P12, and the other end of the moving pair P12 is connected with the connecting rod One end of the rod...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap