

Lane change decision-making method and device for autonomous vehicle
A technology of automatic driving and decision-making methods, applied in the direction of motor vehicles, vehicle position/route/height control, transportation and packaging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
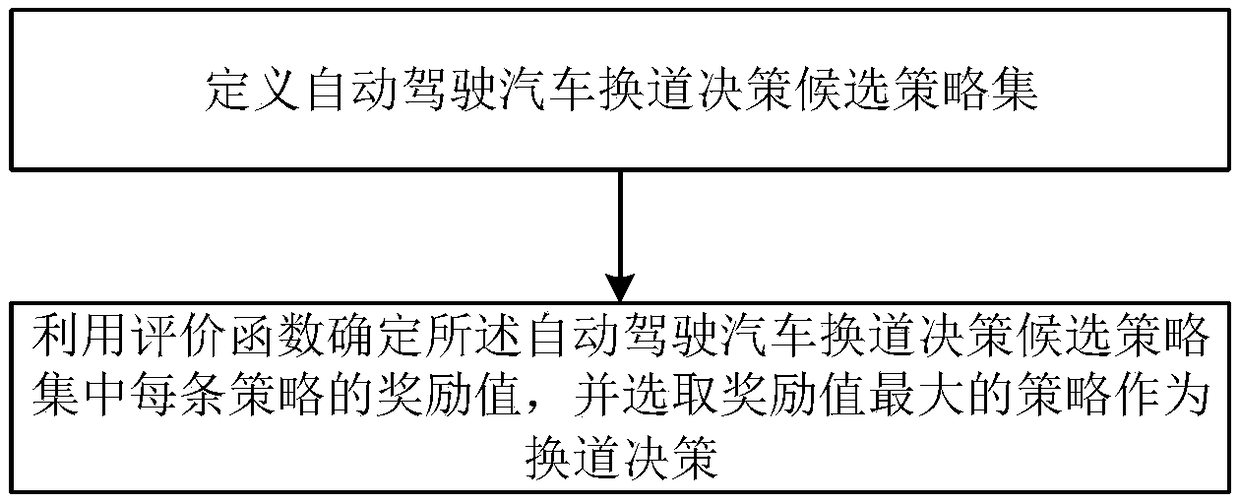
[0075] The embodiment of the present invention proposes a lane-changing decision-making method for an automatic driving vehicle, the flow chart of which is as follows figure 1 shown, including the following steps:
[0076] Define the candidate strategy set for lane-changing decisions of autonomous vehicles;
[0077] Utilize the evaluation function to determine the reward value of each strategy in the set of candidate strategies for lane-changing decisions of the self-driving car, and select the strategy with the largest reward value as the lane-changing decision;
[0078] Wherein, the evaluation function is constructed according to the movement state of the self-driving car at each prediction moment and the movement state of other cars in the traffic scene at each prediction moment in the prediction period corresponding to the centralized strategy of the autonomous vehicle lane-changing decision candidate strategy.
[0079] The described definition self-driving car lane-chang...
Embodiment 2
[0158] The embodiment of the present invention also proposes an automatic driving vehicle lane change decision-making device, including:
[0159] A definition module is used to define a candidate strategy set for lane-changing decisions of autonomous vehicles;
[0160] Decision-making module, for using evaluation function to determine the reward value of each strategy in the set of candidate strategies for lane-changing decisions of the self-driving car, and select the strategy with the largest reward value as the lane-changing decision;
[0161] Wherein, the evaluation function is constructed according to the movement state of the self-driving car at each prediction moment and the movement state of other cars in the traffic scene at each prediction moment in the prediction period corresponding to the centralized strategy of the autonomous vehicle lane-changing decision candidate strategy.
[0162] Specifically, the definition module defines a candidate strategy set for lane-c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More