Adaptive non-smooth trajectory tracking control method for industrial robot
A technology of industrial robot and control method, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems in engineering application, limited performance, performance deterioration, etc., and achieve good trajectory tracking dynamic and static quality , Improve the robustness and control accuracy, improve the effect of rapidity and anti-disturbance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
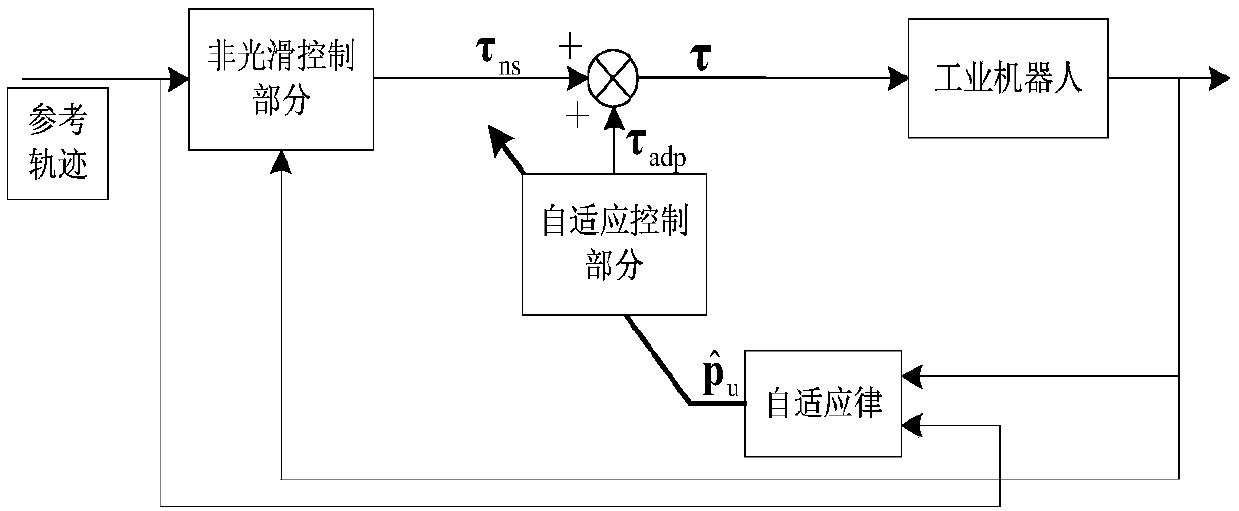
[0027] figure 1 Schematic diagram of the designed controller structure.
[0028] Industrial Robot Dynamics. When considering the deviation of industrial robot parameters, its dynamic equation can be rewritten as:
[0029]
[0030] in: are the joint position, velocity and acceleration vectors respectively, where: Φ is the regression matrix of the dynamic model Abbreviation for; M o (q), G o (q) are the inertia matrix, Coriolis force and centripetal force matrix and gravity vector under the nominal parameters respectively; Φp u Represents model bias due to parameter mismatch: p u is the parameter mismatch part.
[0031] remember The kinetic equation can be further rewritten as:
[0032]
[0033]
[0034] in: for the desired trajectory.
[0035] The controller designed in the present invention can be divided into a non-smooth control part and an adaptive control part. That is, the controller output can be transformed into:
[0036]
[0037] in: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com