Robot environment mapping method and device, and robots
A robot and environmental map technology, applied in the computer field, can solve the problems of low work efficiency and poor flexibility, achieve the effect of improving performance, increasing efficiency and flexibility, and realizing the sharing of environmental map information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention. On the contrary, the embodiments of the present invention include all changes, modifications and equivalents coming within the spirit and scope of the appended claims.
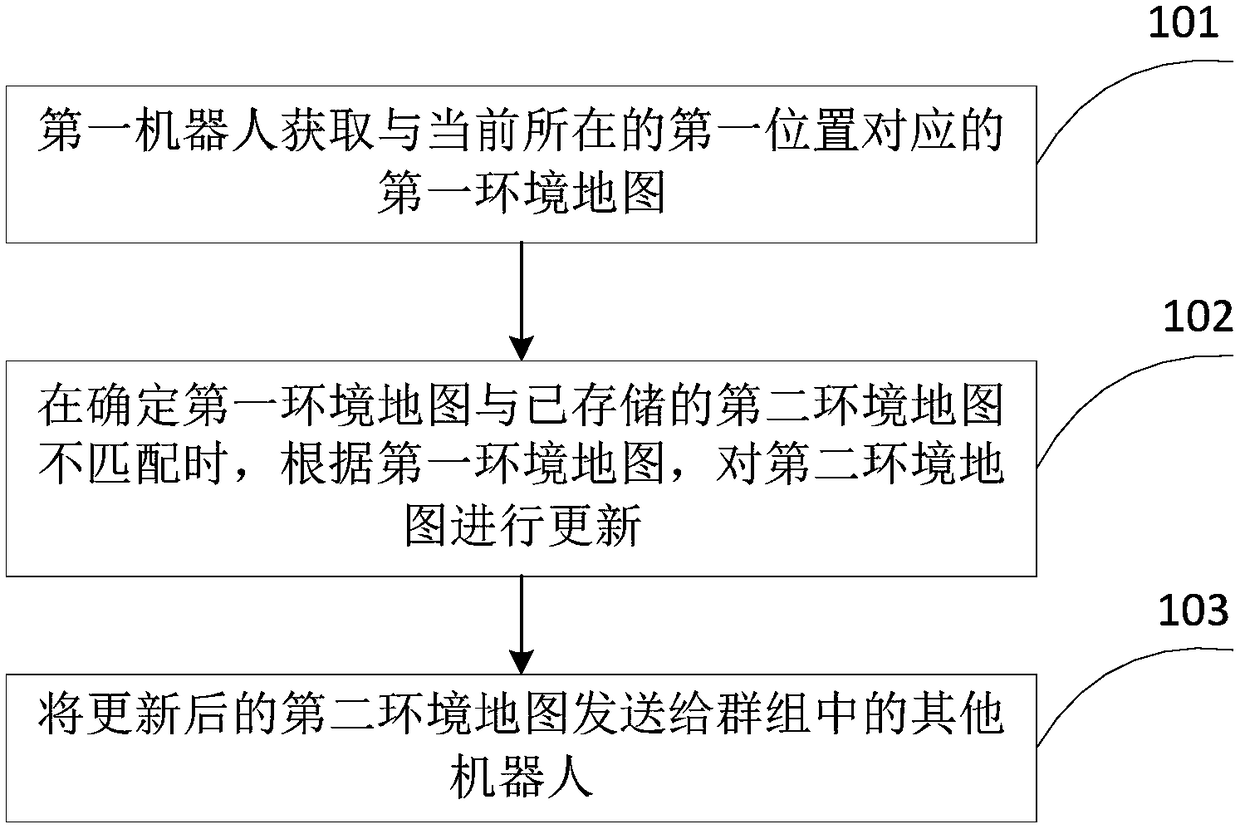
[0065] The embodiments of the present application mainly aim at the problems of low overall work efficiency and poor flexibility in the existing robot environment mapping methods because each robot independently constructs the environment mapping method, and proposes a robot environment mapping method. The robot environment mapping method provided by this application uses ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap