

Flexible mechanical arm and system
A flexible manipulator and boom technology, applied in the system field, can solve the problems of shape deformation, affecting the accuracy of the boom linkage, occupying the internal space of the boom, etc., to achieve the effect of reducing the number of types, easy industrialization, and improving diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
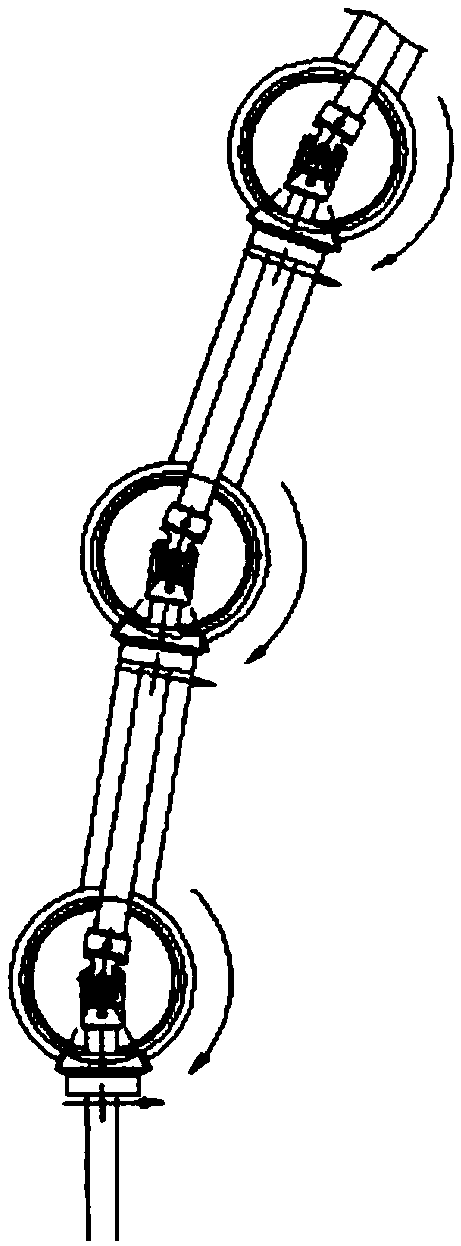
[0039] The flexible arm in the following embodiments of the present invention mainly includes multi-section arm joint sections and corresponding linkage ropes, and also includes a central block. The arm joint sections are connected with the central block through a rotating connection mechanism to form a unit of the arm main body. units form the main body of the boom. The main body of the boom, linkage rope and its linkage are introduced respectively below.
[0040] 1. The main body of the boom
[0041] like Figure 4a , 4b As shown, after the two side lugs of the arm joint section 11 are connected to the central block 21, the pin shafts 312, 314 are respectively pressed in from the ears on both sides of the arm joint section to realize the relative rotation between the joint section and the central block. Wherein the pin shaft is made up of two sections, and one section is a cylindrical surface and a central block to form a rotary hinge. The other section is a "D-shaped" s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More