

Robot-assisted elevator taking system, method and device as well as storage medium
A robot-assisted and robotic technology, applied in elevators, transportation and packaging, etc., can solve problems such as decreased work fluency, increased labor costs, and low interaction efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
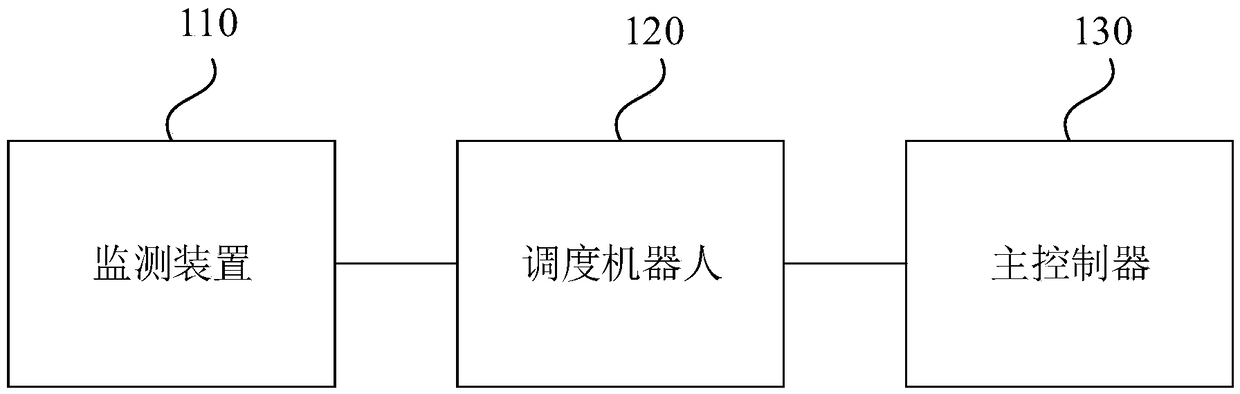
[0038] figure 1 It is a structural schematic diagram of a robot-assisted elevator system provided in Embodiment 1 of the present invention, as shown in figure 1 As shown, the elevator system includes: a monitoring device 110 , a dispatching robot 120 and a main controller 130 .
[0039] The monitoring device 110 is connected in communication with the dispatching robot 120, and is used to monitor and track the status information of the elevator personnel, and sends the status information to the dispatching robot 120; the dispatching robot 120 is connected in communication with the main controller 130, for receiving the status information, obtaining The elevator request of the elevator personnel, and send the status information and elevator demand to the main controller 130; the main controller 130 is used to perform elevator scheduling according to the elevator request and the current elevator running status, and feedback the elevator scheduling results To the dispatching robo...
Embodiment 2
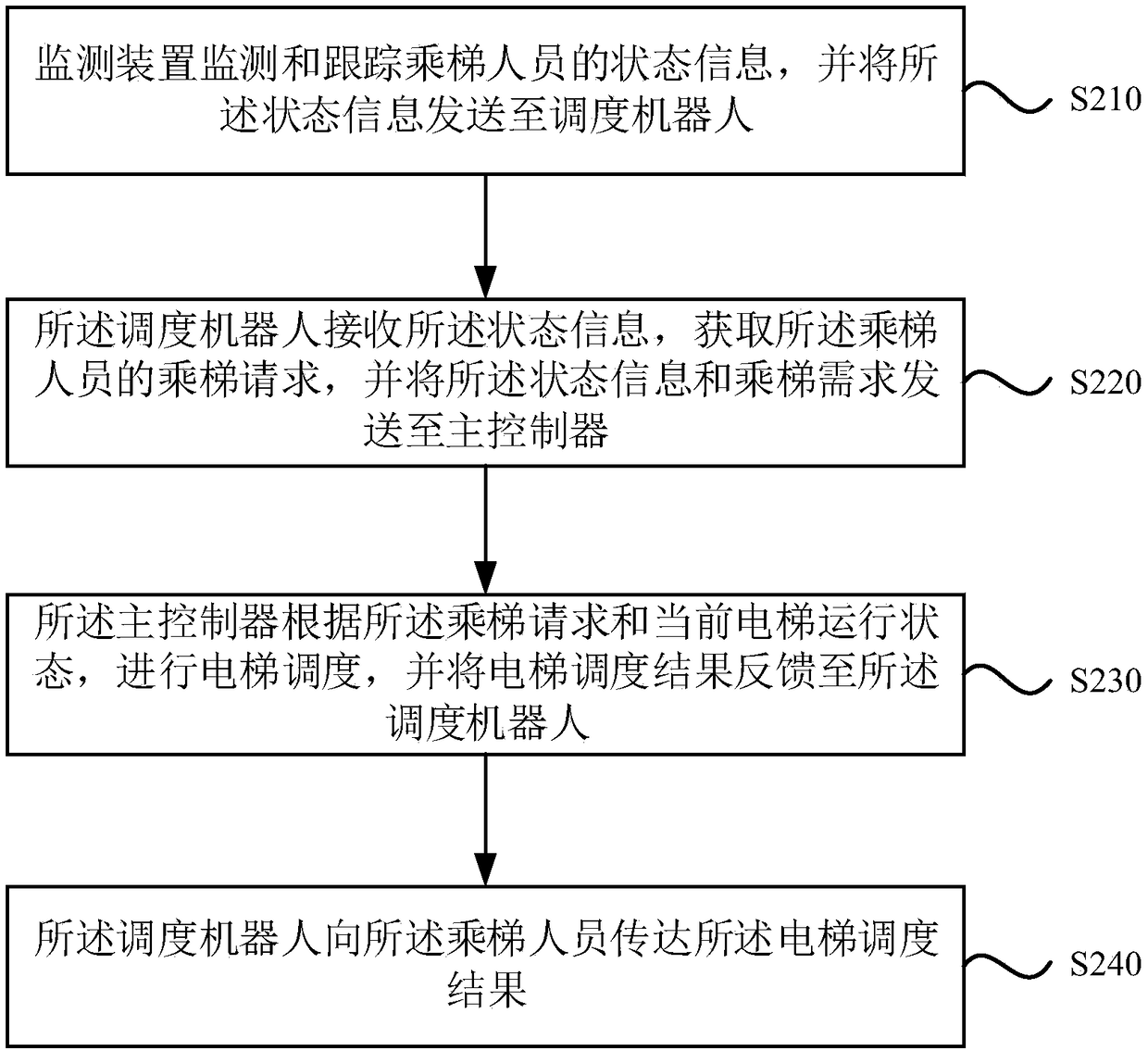
[0047] figure 2 It is a flowchart of a robot-assisted elevator riding method provided by Embodiment 2 of the present invention. This embodiment is applicable to the case of robot-assisted elevator riding, and the method of elevator riding is performed by the robot-assisted elevator riding system. refer to figure 2 , the robot-assisted method for taking a ladder specifically includes the following steps:
[0048] S210. The monitoring device monitors and tracks the status information of the elevator riders, and sends the status information to the dispatching robot.
[0049] The status information of the elevator passengers includes the number, direction of movement and speed of movement, etc. This kind of status information can be obtained by converting data information such as phase, frequency, time and distance changes measured by the monitoring device.
[0050] The monitoring device can be installed in different locations of the building, for example, in the entrance and...
Embodiment 3
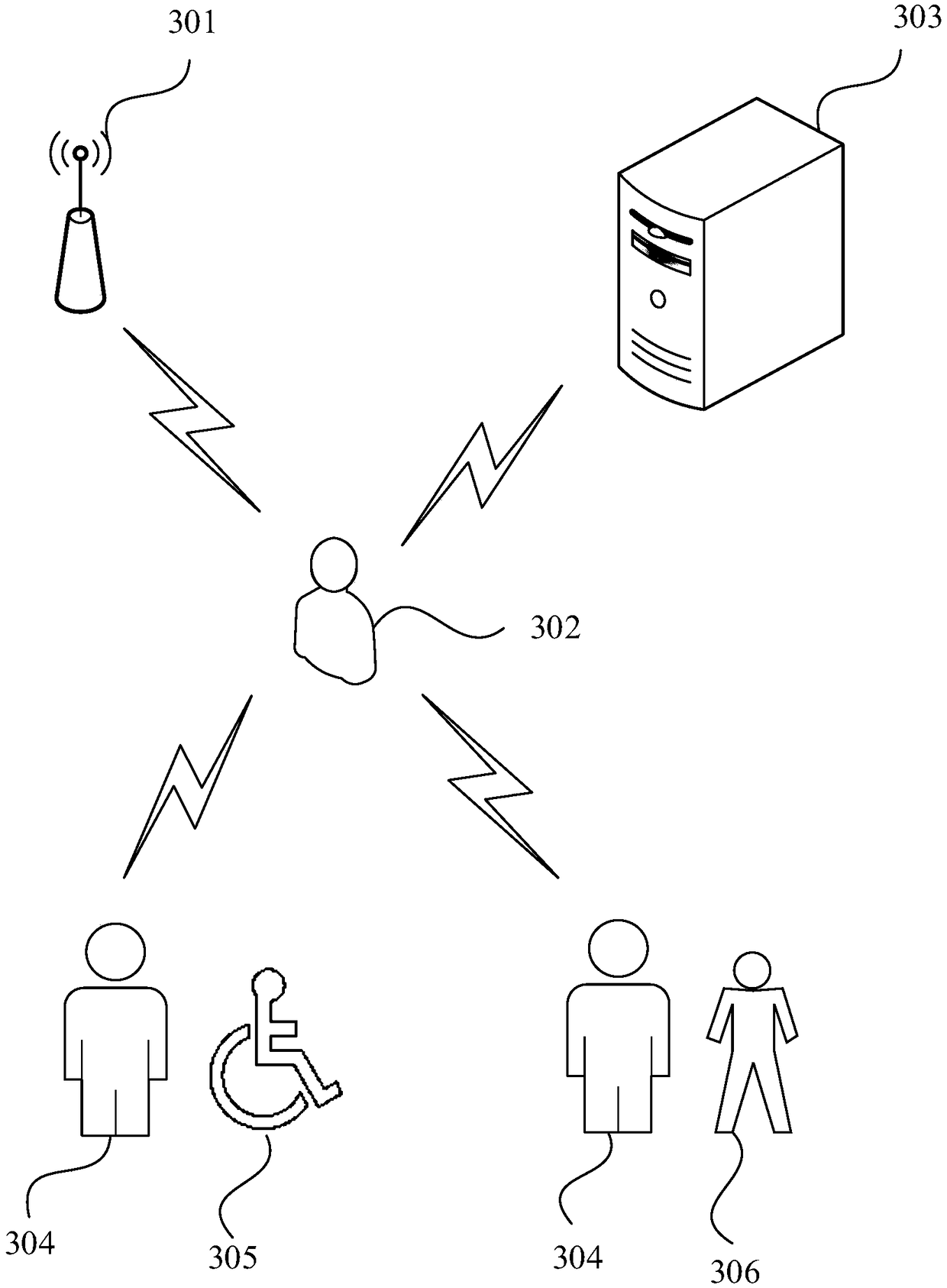
[0068] image 3 It is a schematic diagram of the working state of a robot-assisted elevator system provided by Embodiment 3 of the present invention. Such as image 3As shown, the robot-assisted elevator system may specifically include a monitoring device 301, a dispatching robot 302, a main controller 303, a service robot 304, a disabled elevator rider 305, and a delivery person 306, wherein the service robot 304 may have multiple . In practical applications, there may be various working states of the robot-assisted elevator system, and this embodiment exemplifies common working states.
[0069] In the embodiment, in order to ensure the reliability and safety of the elevator, only one dispatching robot 302 is authorized. Elevator is a special equipment with very high reliability and safety requirements. To realize the function of robot-assisted elevator, it is necessary for the robot to realize information interaction with the elevator, and the elevator needs to authorize ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More