

Intelligent control system based on recognition and prediction of dangerous robot actions
An action recognition and dangerous technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of poor control accuracy, poor recognition ability, low precision, etc., to achieve easy identification and mastery, improve learning ability, and convenient control Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing.
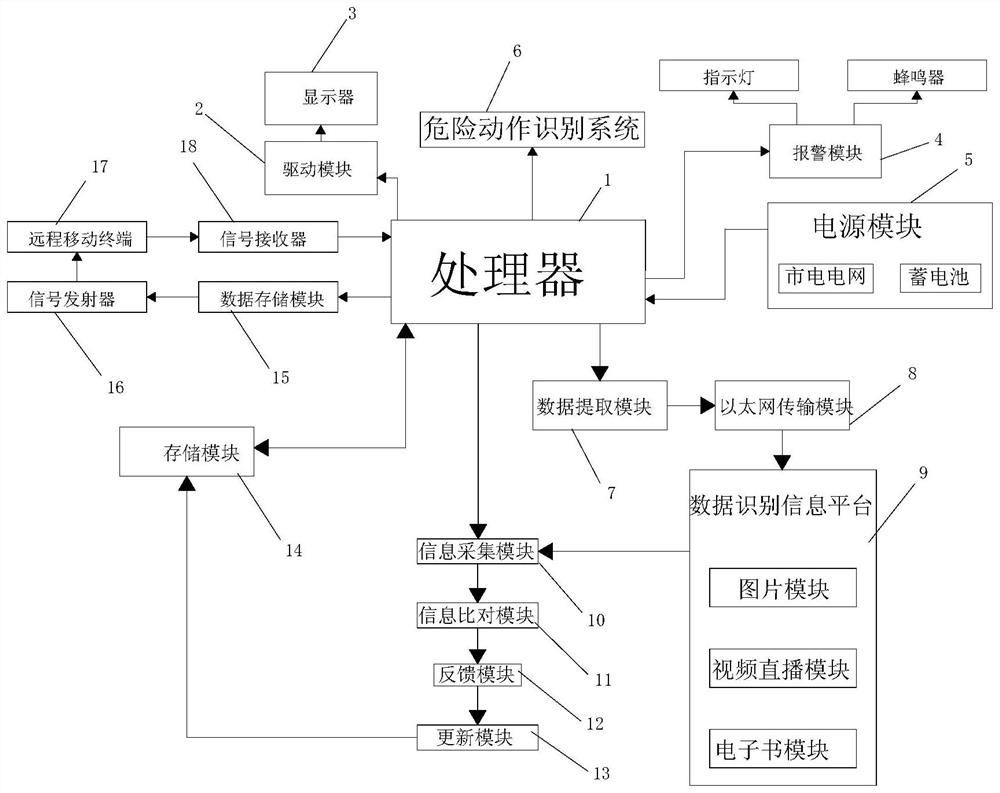
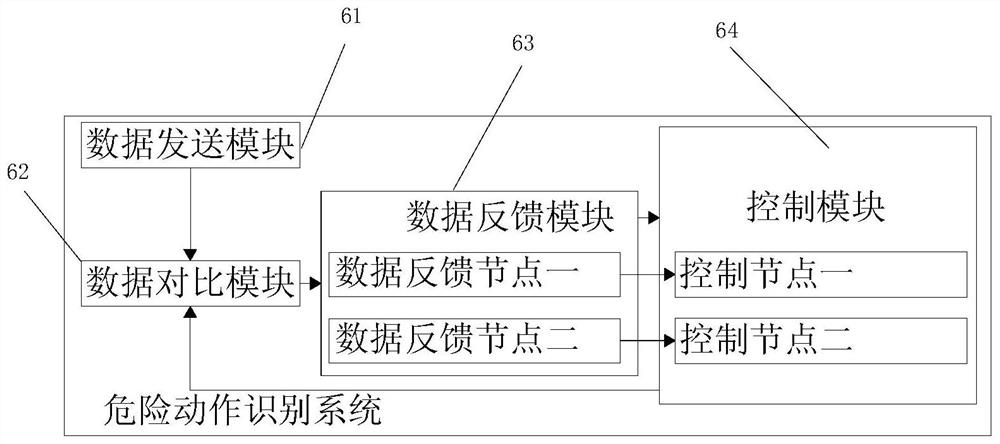
[0026] see figure 1 and figure 2 , the intelligent control system based on robot dangerous action recognition and prediction of the present invention includes a processor 1, the output end of the processor 1 is electrically connected to the input end of the drive module 2, and the output end of the drive module is electrically connected to the input end of the display 3. connection, the output end of the processor 1 is electrically connected to the input end of the alarm module 4, the output end of the alarm module 4 is electrically connected to the input end of the indicator light and the buzzer respectively, and the output end of the power supply module 5 is electrically connected to the input end of the processor 1 Terminal electrical connection, the power module 5 includes the mains power grid and the battery, by setting the alarm module, buzzer and indicator light, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More