

Seatable lower extremity exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve the problems of insufficient portability, heavy weight of the exoskeleton, and inability for patients to sit down conveniently, and achieve the effect of ensuring safety, light weight, and enhancing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
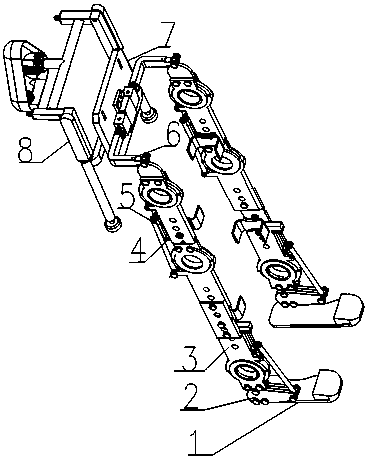
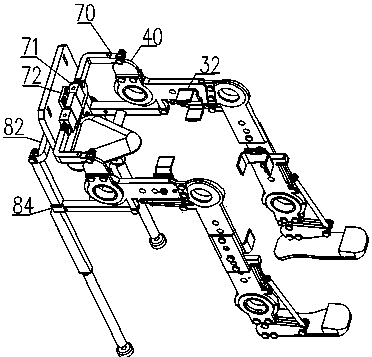
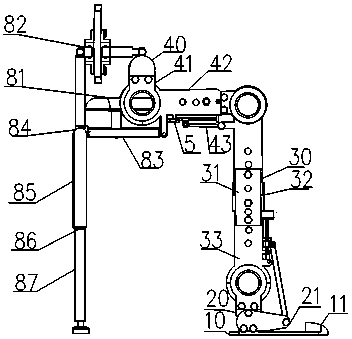
[0022] The present invention is described in detail below in conjunction with accompanying drawing, please refer to Figure 1 to Figure 7 .
[0023] The novel lower extremity exoskeleton rehabilitation robot of the present invention includes a sitting posture assisting device 8 , a back assembly 7 , a hip assembly 6 , a driving device 5 , a thigh assembly 4 , a calf assembly 3 , an ankle assembly 2 and a foot assembly 1 . The front surface of the back component 7 is connected to the thigh component 4 through the hip joint component 6, and the rear end surface is connected to the rotation pair of the sitting posture assisting mechanism 8. Each thigh component 4 is connected to the lower leg component 3 through the knee joint component, and the lower leg component 3 is connected to the foot component through the ankle joint. 1. A connection block 34 and a flexion and extension rotation block 41 are connected between the thigh assembly 4 and the calf assembly 3, and the connectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More