Six-wheeled foot robot
A robot and wheel-foot technology, applied in the field of robots, can solve the problems of heavy crawler structure, limited ability to overcome obstacles, complicated control, etc., to achieve the effect of high efficiency and practicability, widening application occasions, and simple and convenient operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiment of the present invention will be described in further detail by describing the embodiments below with reference to the accompanying drawings, the purpose is to help those skilled in the art to have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and contribute to its implementation.
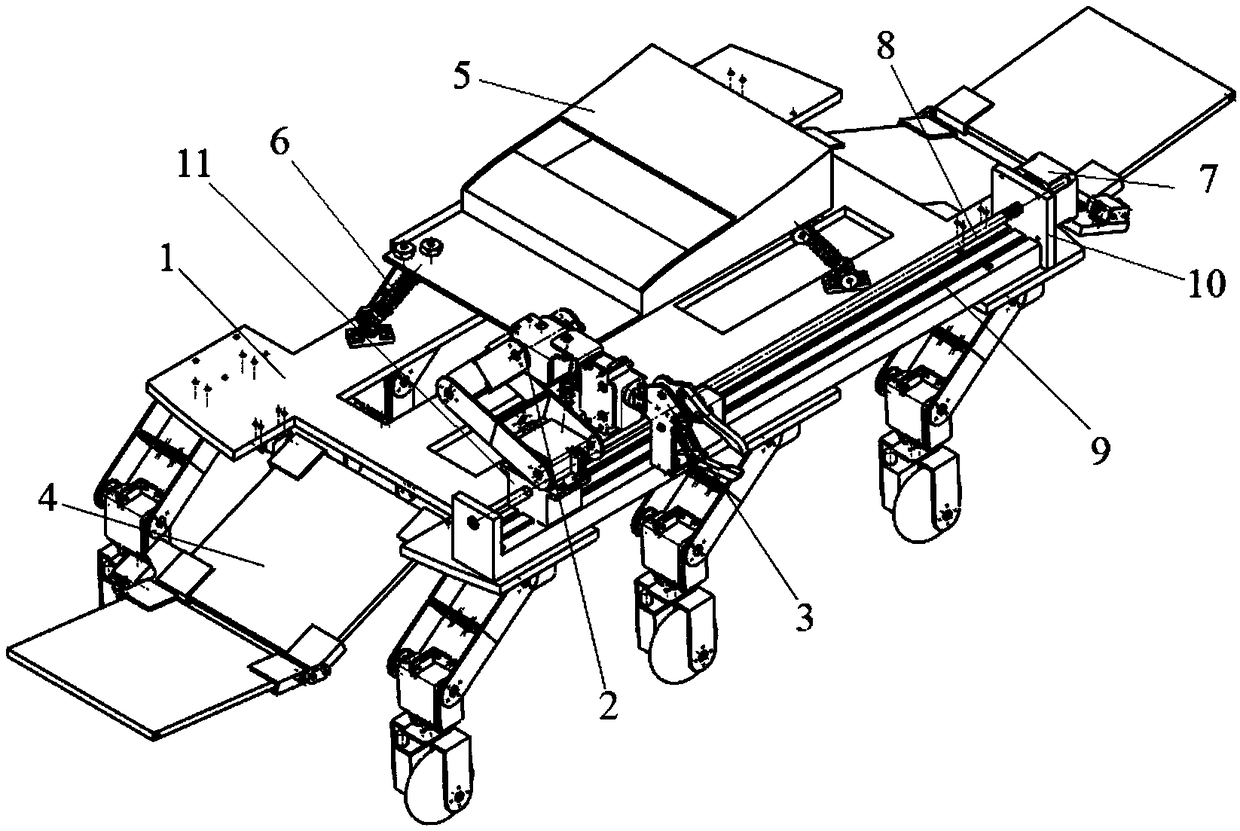
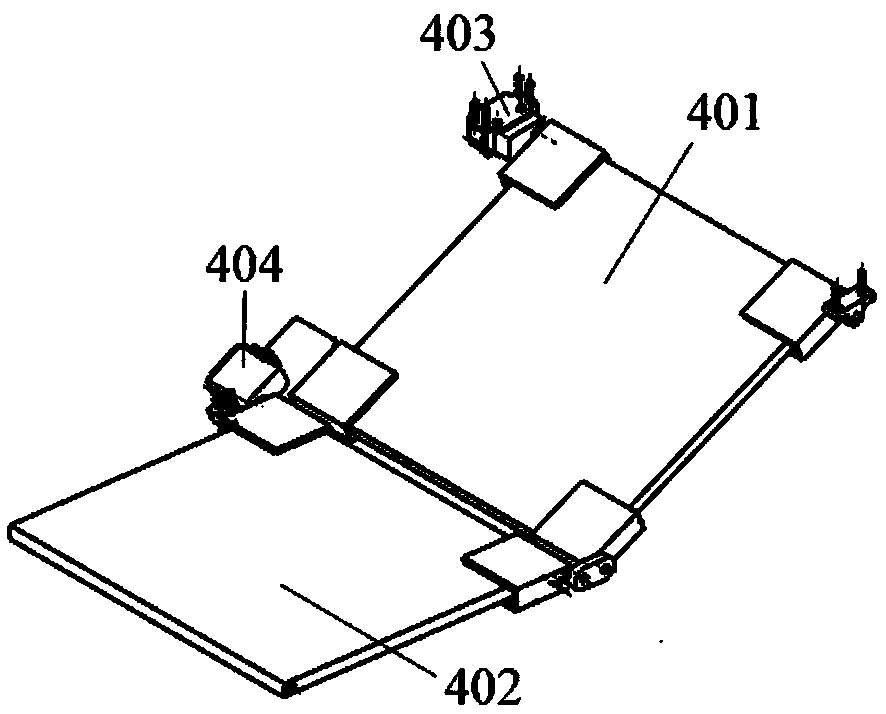
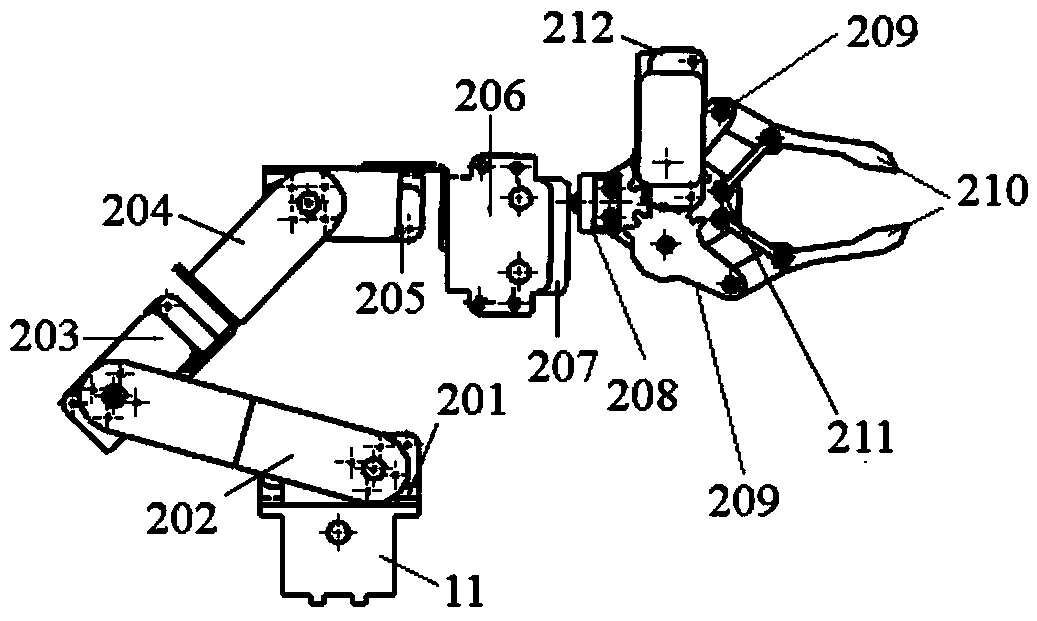
[0023] Such as Figure 1 to Figure 5 As shown, the present invention provides a six-wheel-footed robot, including a frame body 1, a wheel-foot type kinematic branch chain 3 arranged on the frame body 1, and a wheel-foot type kinematic branch chain 3 arranged on the frame body 1 and can be folded and unfolded. The solar power generation device 4 for switching between states, the robot arm 2 for picking up objects, and the driving device arranged on the frame body 1 and used for controlling the movement of the robot arm 2 along the first direction.
[0024] Specifically, as figure 1 with figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com