

Dual-axis rotary modulation system full-parameter self-calibration method
A dual-axis rotation and modulation system technology, applied in the field of inertial navigation, can solve the problems of complex calibration process, long cycle time, expensive calibration cost, etc., to achieve accurate and effective methods, easy to implement, and save the need for dismantling and returning to the factory for calibration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
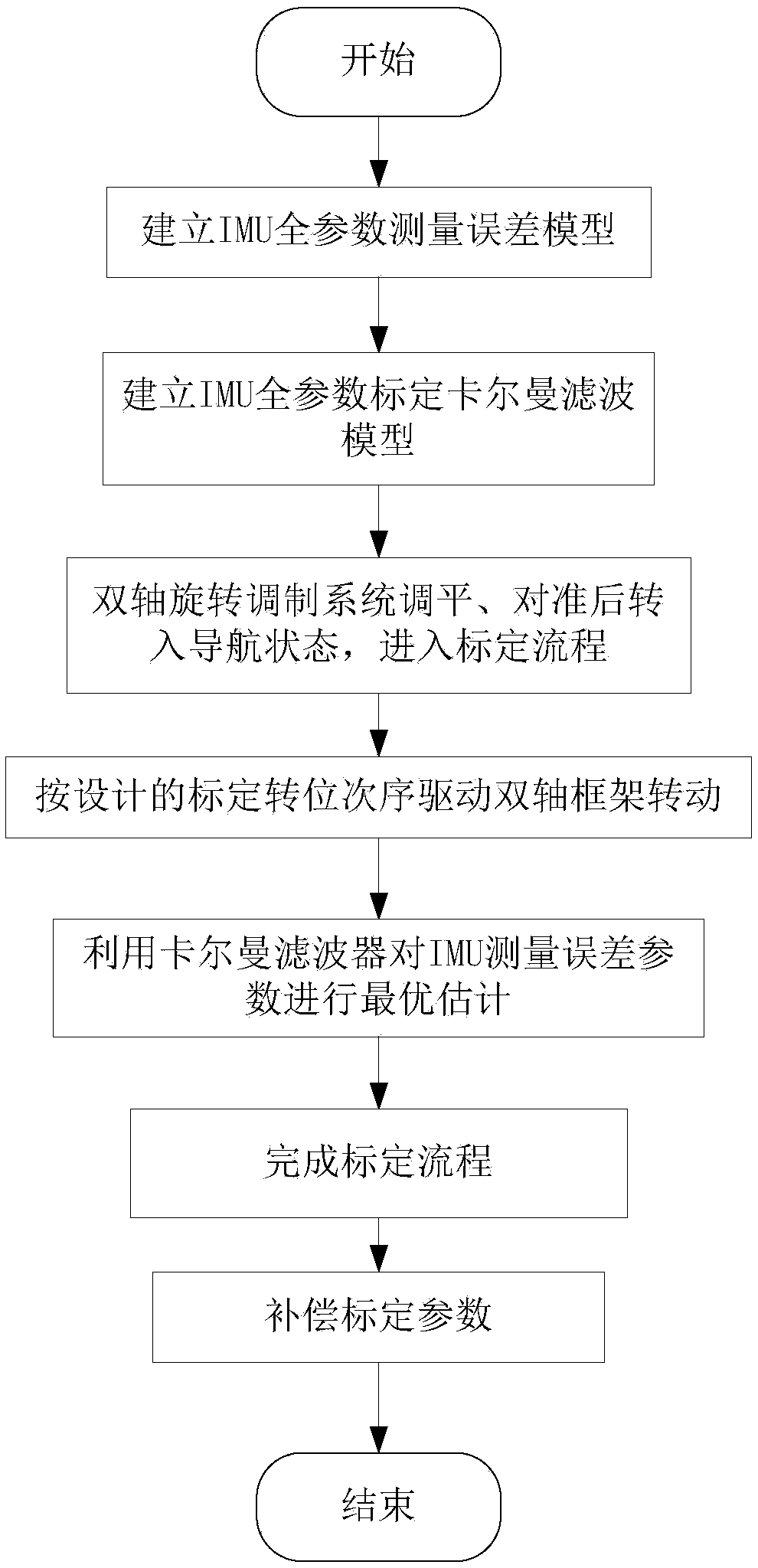
[0019] The dual-axis rotating frame structure can realize the full parameter excitation of the three-axis gyroscope and accelerometer errors through the design of the indexing strategy, and finally reflect the change trend of the speed error and position error through the navigation integration process, so it has structural characteristics. The ability to calibrate the inertial navigation system with full parameters. As an effective state estimation method, the Kalman filter can use the error state model of the inertial navigation system to effectively track the real-time changes of the navigation error characteristics with the indexing maneuver, obtain the excitation characteristics of the device error parameters, and use external measurements to obtain the velocity The change trend of the error and position error, that is, the response of the excitation, obtains the estimation of the IMU measurement error parameters through the state estimation method, and completes the calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More