

Biped robot design containing waist structure and feedback control method
A bipedal robot and design method technology, applied in the field of robotics, can solve the problems of uncontrollable robot state, unstable walking, etc., and achieve the effect of strong practical guidance value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to facilitate those skilled in the art to better understand the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. The following is only exemplary and does not limit the protection scope of the present invention.
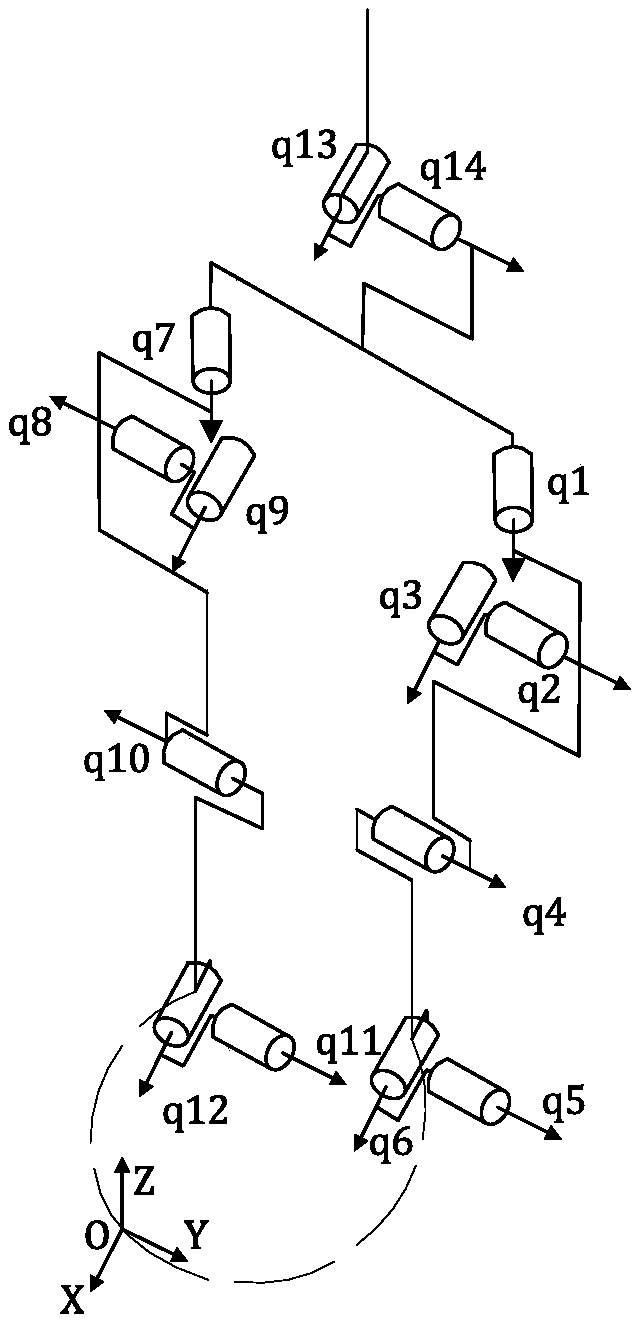
[0041] Such as figure 1 , the biped robot of the present invention is configured with 14 degrees of freedom q1~q14, including 4 degrees of freedom (q5, q6, q11, q12) of double ankle pitch and roll, and 2 degrees of freedom (q4, q10) of double knee pitch , 4 degrees of freedom of hip pitch and roll (q3, q2, q8, q9), 4 degrees of freedom of waist pitch, roll and yaw (q1, q7, q13, q14).
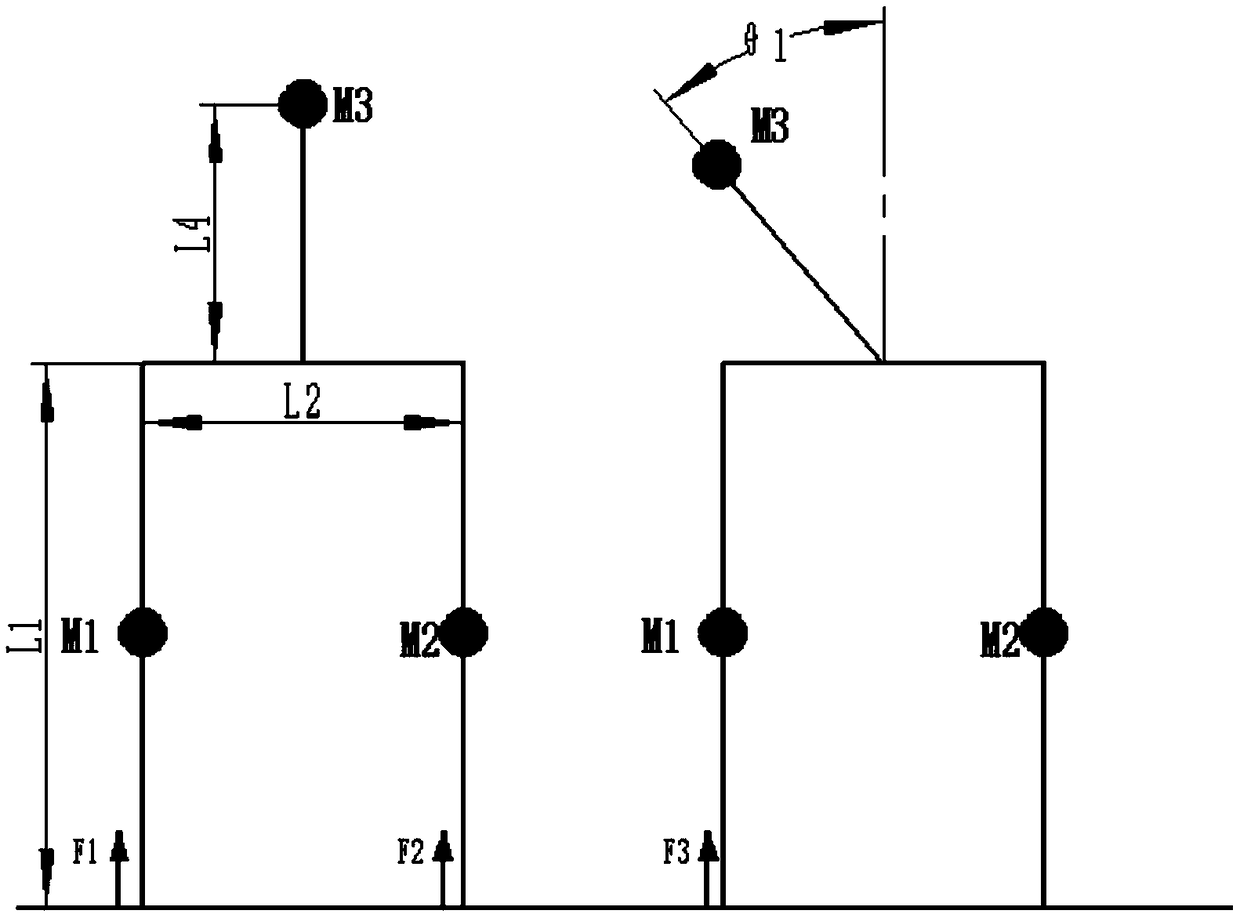
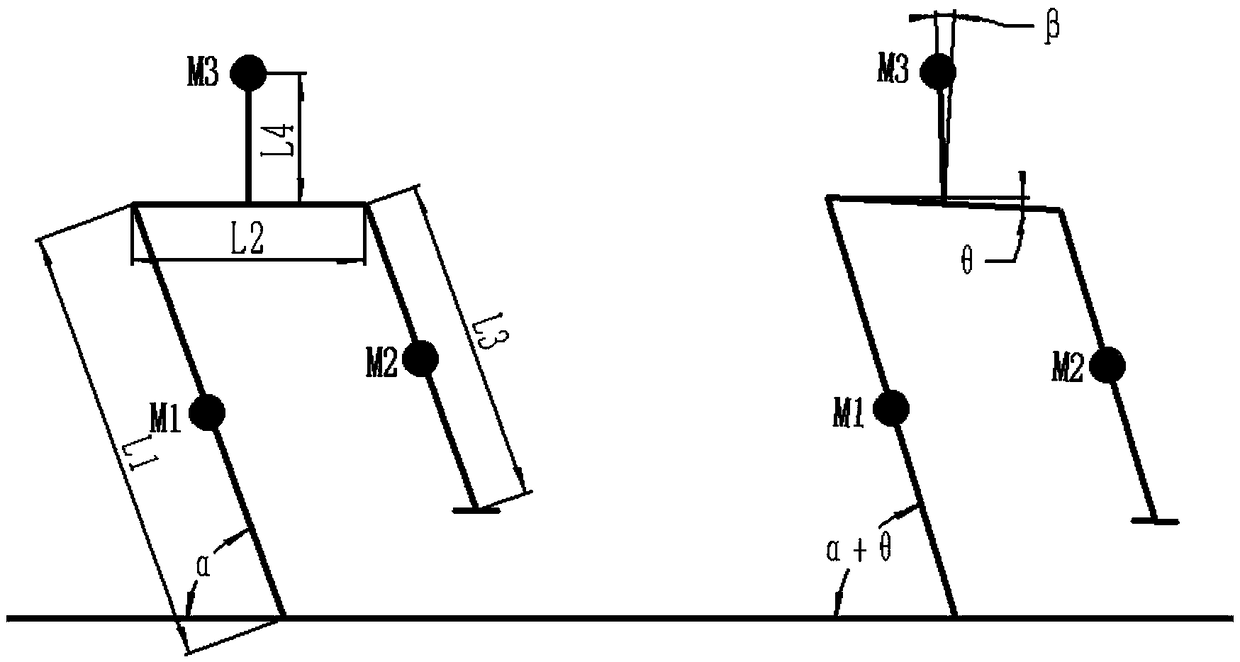
[0042] Such as figure 2 , the mass M3 of the upper body of the biped robot is concentrated at one point, and the vertical distance from the waist is L2; the mass M1 and M2 of the left and right legs are also based on the midpoint of the legs, and the leg length i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More