

A method and system for predicting flight status of unmanned aerial vehicles based on LSTM
A technology of flight status and drones, which is applied in neural learning methods, neural architectures, biological neural network models, etc., and can solve problems such as inability to predict actions with data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
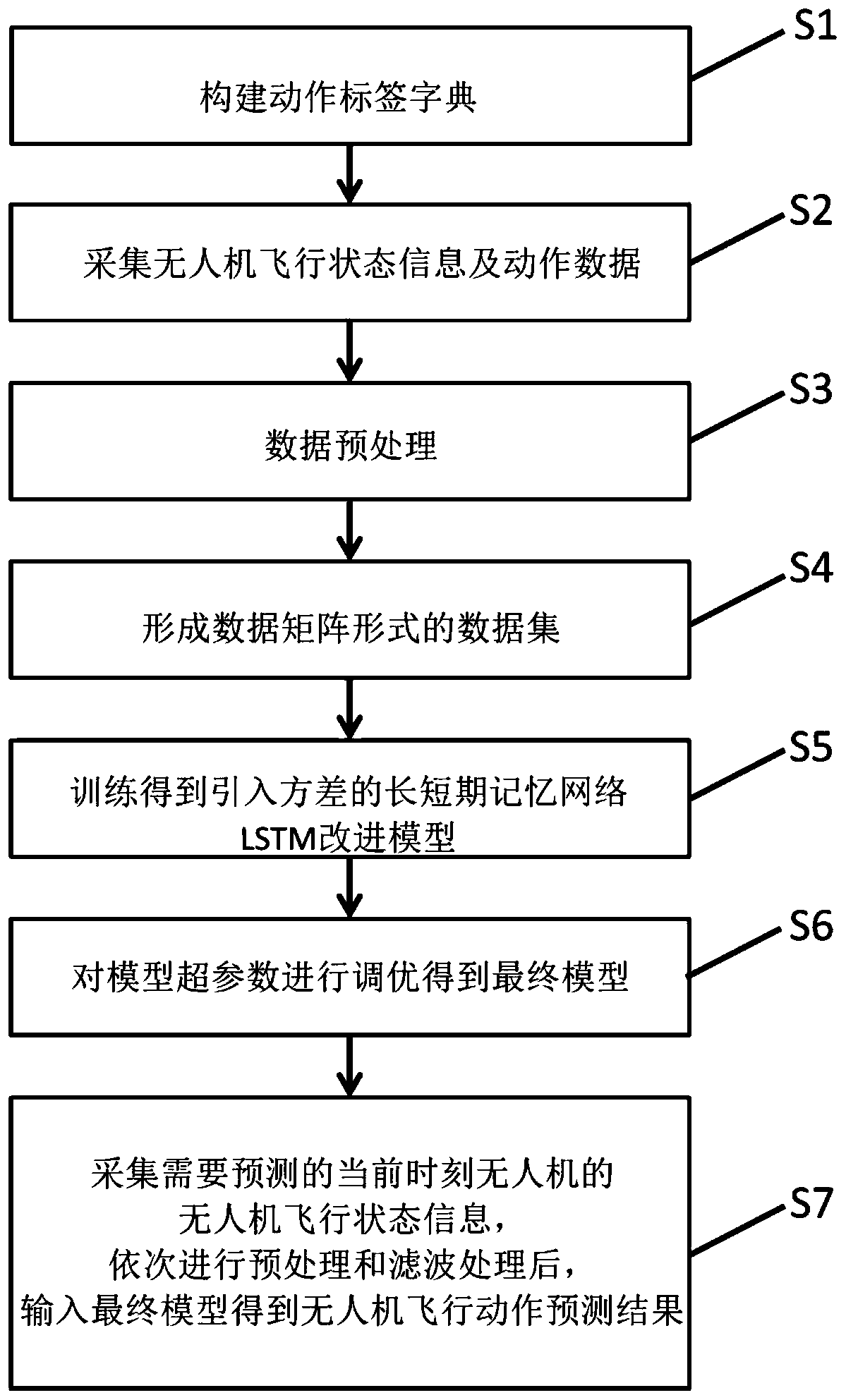
[0078] Such as figure 1 As shown, the present invention provides a kind of LSTM-based UAV flight action prediction method, comprising the following steps:
[0079] Step 1: Build an action tag dictionary for converting values into action tags;
[0080] Step 2: According to the same time interval, respectively collect the flight status information of the drone corresponding to multiple moments during the flight process of the drone, and the action data of the next moment corresponding to each moment; convert the action data into action label;
[0081] Step 3: For each type of UAV flight status information collected, preprocessing is performed according to the ascending order of the data values of the UAV flight status information, including filling in missing value position data and replacing outlier data;
[0082] Step 4: Perform one-hot encoding on the action label, and form a data set in the form of a data matrix together with the preprocessed UAV flight status informat...
Embodiment 2
[0151] The present invention also provides an LSTM-based UAV flight action prediction system, comprising:
[0152] Action tag dictionary unit: used to convert values into action tags;
[0153] Data acquisition unit: used to collect the flight state information of the drone corresponding to multiple moments during the flight process of the drone and the action data of the next moment corresponding to each moment when building the model, and pass the action data through the action tag dictionary unit into action tags;
[0154] Or it is used to collect the UAV flight status information of the UAV at the current moment that needs to be predicted;
[0155] Data preprocessing unit: for each type of UAV flight status information collected by the data acquisition unit, preprocessing is performed according to the ascending order of the data values of the UAV flight status information, including filling missing value position data and replacing outlier points data;
[0156] Model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More