

Robot collision detection method and device
A technology of collision detection and robotics, applied in manipulators, manufacturing tools, etc., can solve the problem of high cost of robots, achieve good dynamic performance, high accuracy, and facilitate industrial promotion and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] According to an embodiment of the present invention, an embodiment of a collision detection method for a robot is provided. It should be noted that the steps shown in the flowchart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and Although the logical sequence is shown in the flowchart, in some cases, the steps shown or described may be performed in a different order than here.
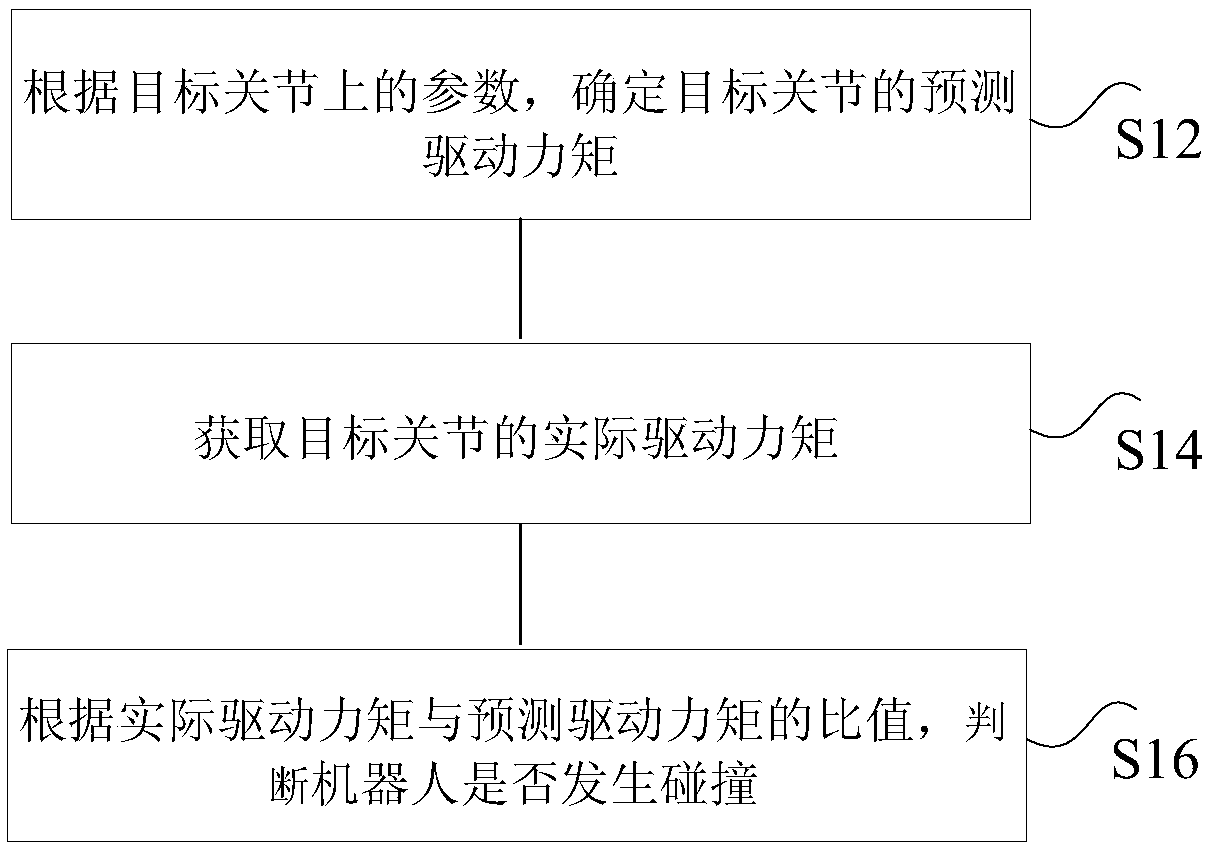
[0025] figure 1 Is a flowchart of the collision detection method of a robot according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0026] Step S12: Determine the predicted driving torque of the target joint according to the parameters on the target joint.
[0027] In an optional solution, the aforementioned target joint may be any one or more of the many joints of the robot. The above-mentioned parameters can be the angle, angular velocity, and angular acceleratio...
Embodiment 2
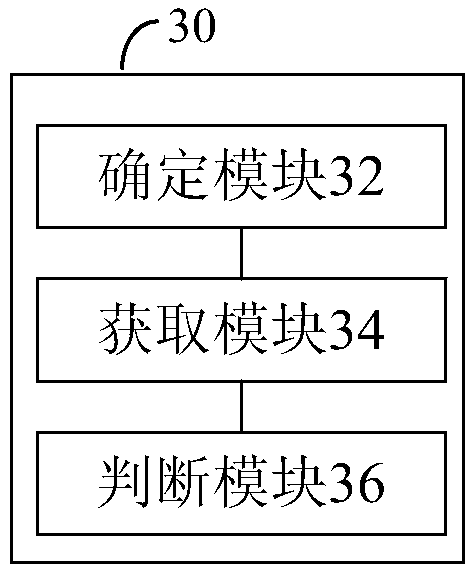
[0068] According to an embodiment of the present invention, a collision detection device for a robot is provided, image 3 Is a schematic diagram of a robot collision detection device according to an embodiment of the present invention, combined with image 3 As shown, the device includes:
[0069] The determining module 32 is configured to determine the predicted driving torque of the target joint according to the parameters on the target joint.
[0070] The obtaining module 34 is used to obtain the actual driving torque of the target joint.
[0071] The judging module 36 is used for judging whether the robot collides according to the ratio of the actual driving torque to the predicted driving torque.
[0072] It can be seen from the above that the foregoing embodiment of the present invention determines the predicted driving torque of the target joint based on the parameters of the target joint, obtains the actual driving torque of the target joint, and determines whether the robot...
Embodiment 3
[0091] According to an embodiment of the present invention, a storage medium is provided, the storage medium includes a stored program, wherein the device where the storage medium is located is controlled to execute the collision detection method of the robot in Embodiment 1 while the program is running.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More