

An Accelerometer Zero Bias Estimation Method Based on Gravity Apparent Velocity and Parameter Identification
A technology of accelerometer zero bias and parameter identification, which is applied in the field of navigation algorithms to achieve the effects of reducing requirements, improving initial alignment accuracy, and improving parameter identification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The technical solution of the present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
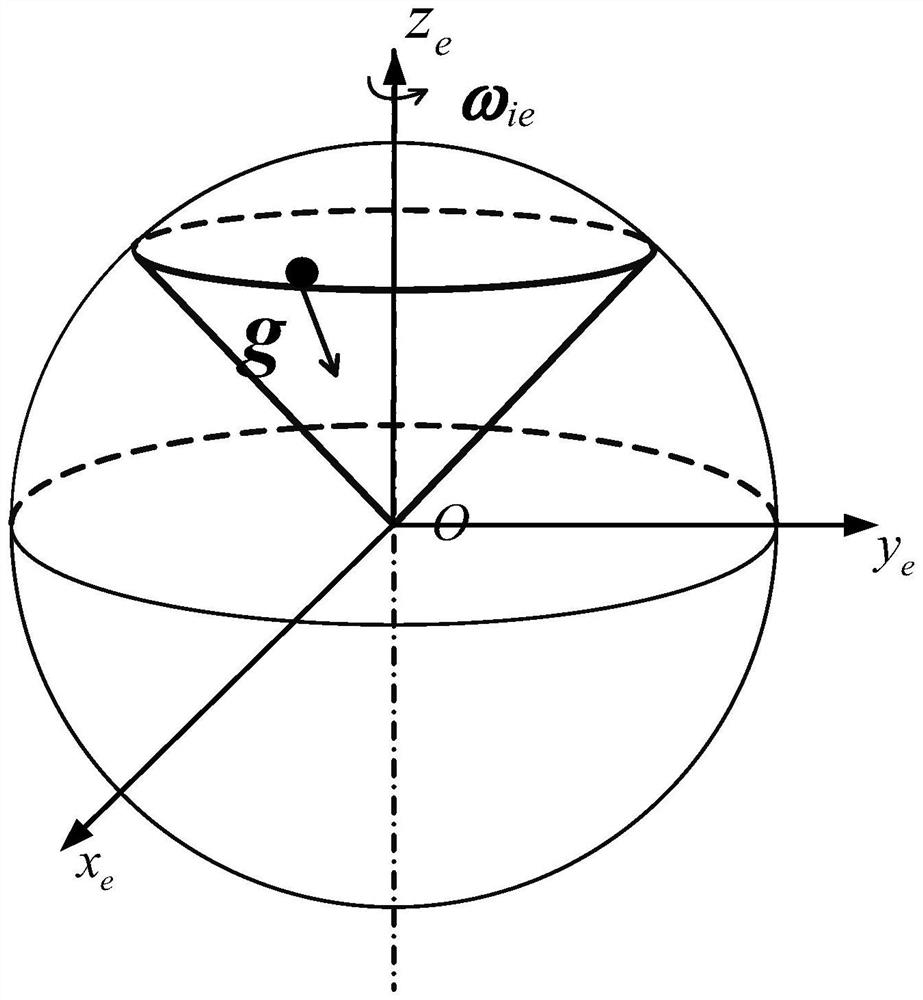
[0048] The present invention utilizes the expression form of the apparent velocity of gravity obtained from the modulus values of each sensitive axis component of the accelerometer to construct the apparent velocity model of gravity including the zero bias of the accelerometer, and to identify the apparent velocity parameters of the accelerometer by integrating the output values of the accelerometer to construct the zero velocity of the accelerometer. In the bias estimation model, after the state vector is determined, a line identification filter is constructed to complete the gravity apparent velocity parameter identification and accelerometer zero bias estimation, and complete the alignment solution.
[0049] figure 1 For the gravity apparent velocity schematic diagram used in the present invention, constructing th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More