

End effector of fire-fighting robot used for fire valve closing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
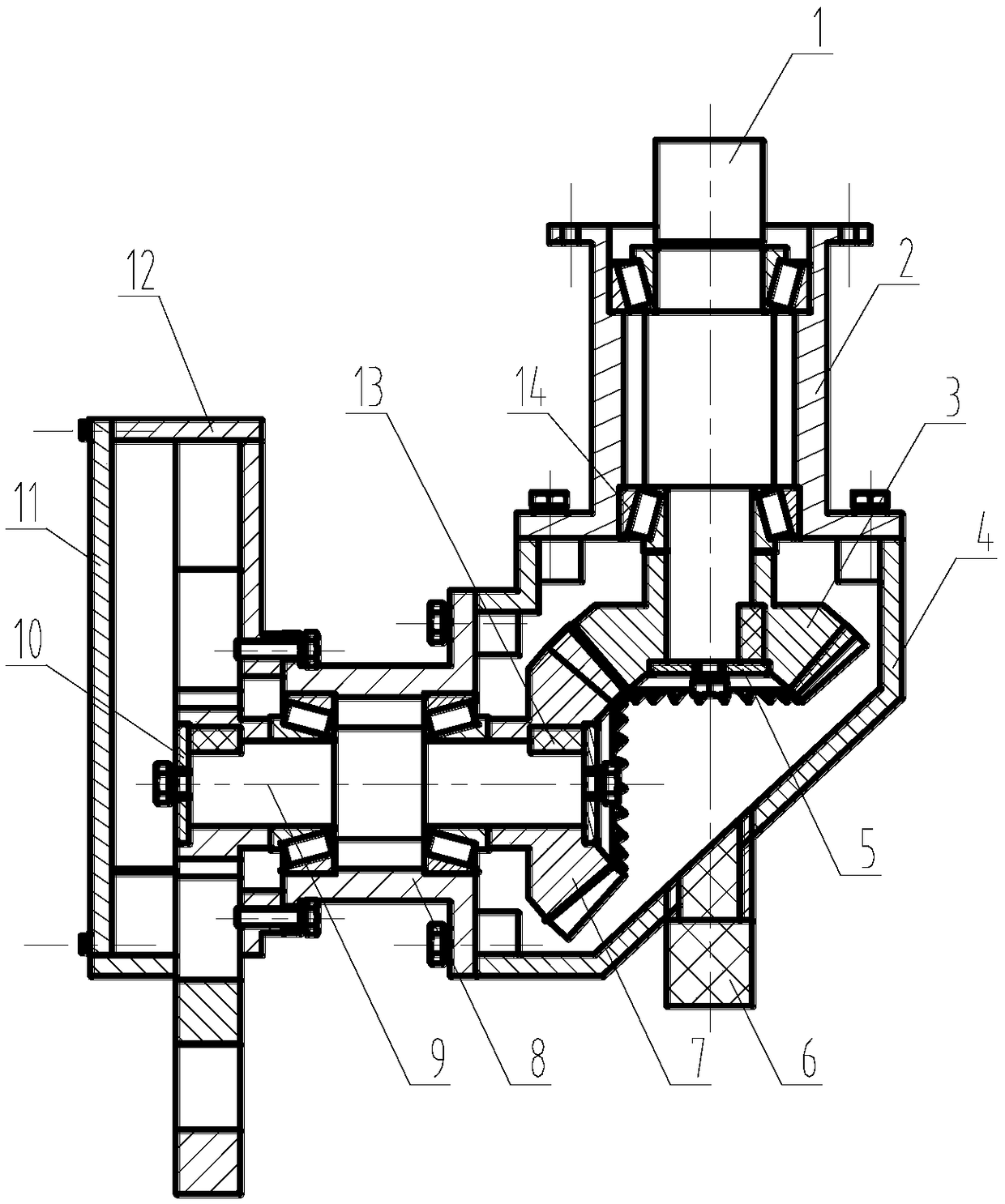
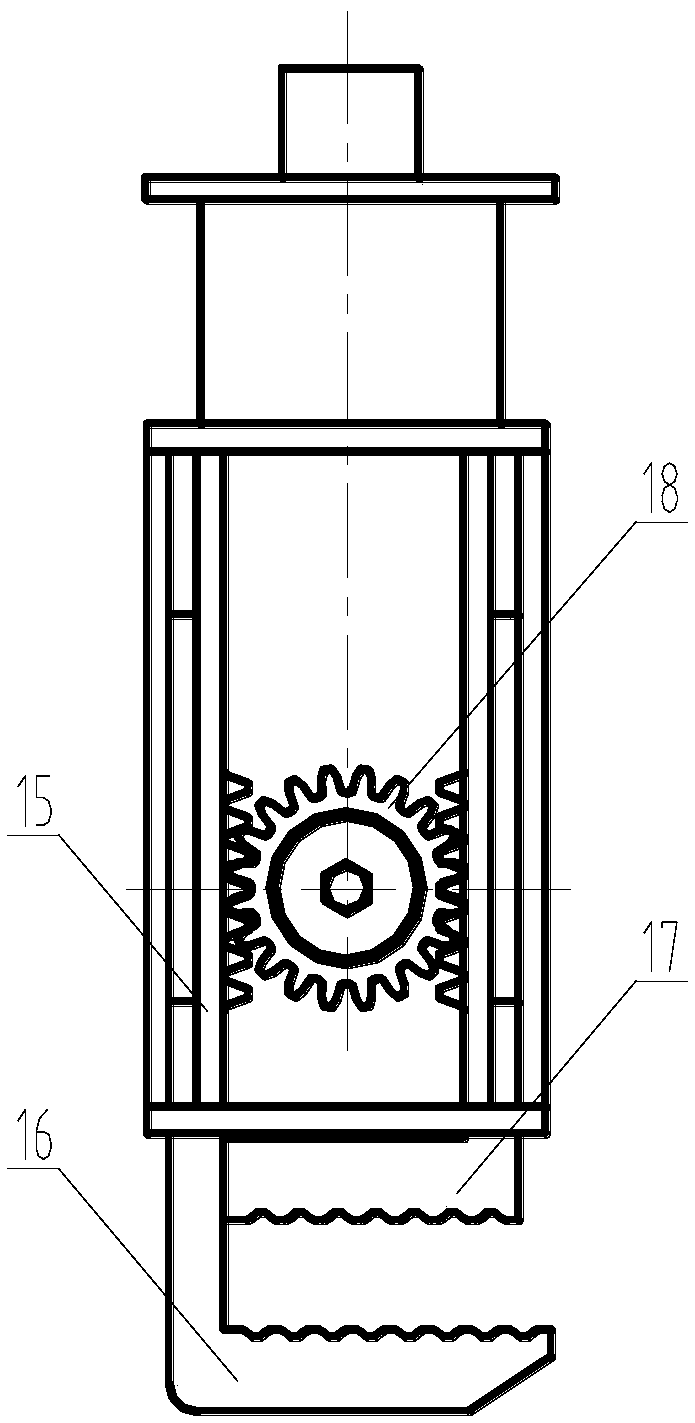
[0022] The invention as figure 1 , 2 As shown, the main components are input shaft 1, T-axis connector 2, input bevel gear 3, connector 4, end cover 5, high temperature resistant camera 6, output bevel gear 7, output shaft connector 8, output shaft 9, end Cover 10, baffle plate 11, case 12, key 13, tapered roller bearing 14, rack pressing plate 15, lower clamp body 16, upper clamp body 17, gear 18, etc. There is a spline groove in the input shaft 1 to connect with the input shaft of the external robot to transmit the main motion. The T-axis connecting body 2 is connected with the T-axis of the external robot through bolts, and drives the entire end effector to rotate 360° around the T-axis. The input bevel gear 3 and the output bevel gear 7 play the role of transmitting the rotary motion of the input shaft 1, and are respectively connected with the input shaft 1 and the output shaft 9 through the key 13, and the end cover 5 plays a role of restricting the input bevel gear 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More