

Method and system for positioning in garage based on depth recognition
A positioning method and technology of a positioning system, applied in the field of garage positioning, can solve the problems that the positioning accuracy cannot meet expectations, the RGB camera cannot recognize the distance and posture of vehicles/personnel, and wireless signal positioning is easily affected by the metal material of the car body, etc. Effects of failure rate, workload saving, and power saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
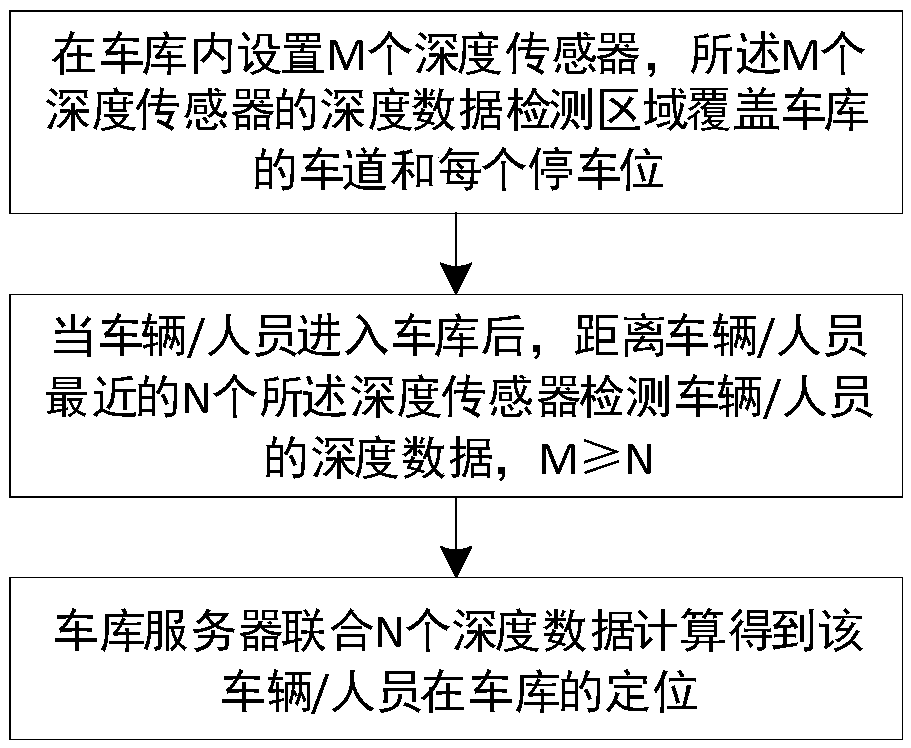
[0053] Embodiment one: if figure 1 As shown, a positioning method based on depth recognition in the garage:
[0054] In the first step, M depth sensors 1 are set in the garage, and the depth data detection area of the M depth sensors 1 covers the driveway and each parking space of the garage;
[0055] In the second step, when the vehicle / person enters the garage, the N depth sensors 1 closest to the vehicle / person detect the depth data of the vehicle / person, M≥N;
[0056] In the third step, the garage server calculates the position of the vehicle / person in the garage by combining the N depth data.
[0057] The depth data in this embodiment is a depth image of a vehicle / personnel, and the depth data detection area of each of the depth sensors 1 is a fixed area, then N takes the minimum value.
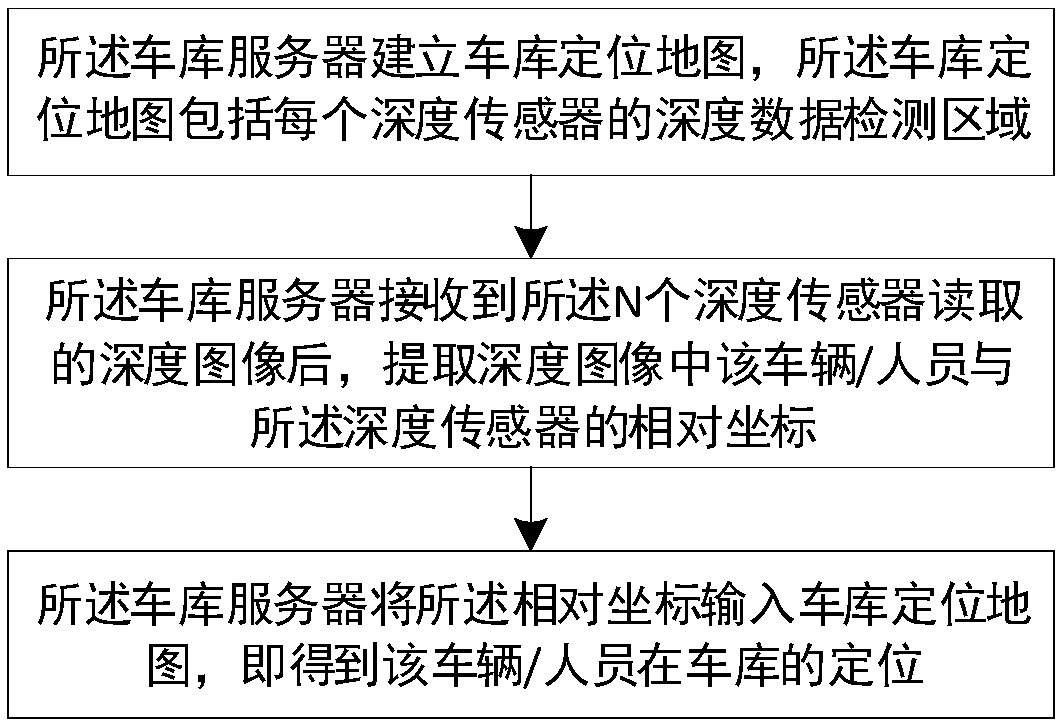
[0058] N is preferably 1, and the third step is as figure 2 Shown:
[0059] A1, the garage server establishes a garage positioning map, and the garage positioning map includes t...
Embodiment 2
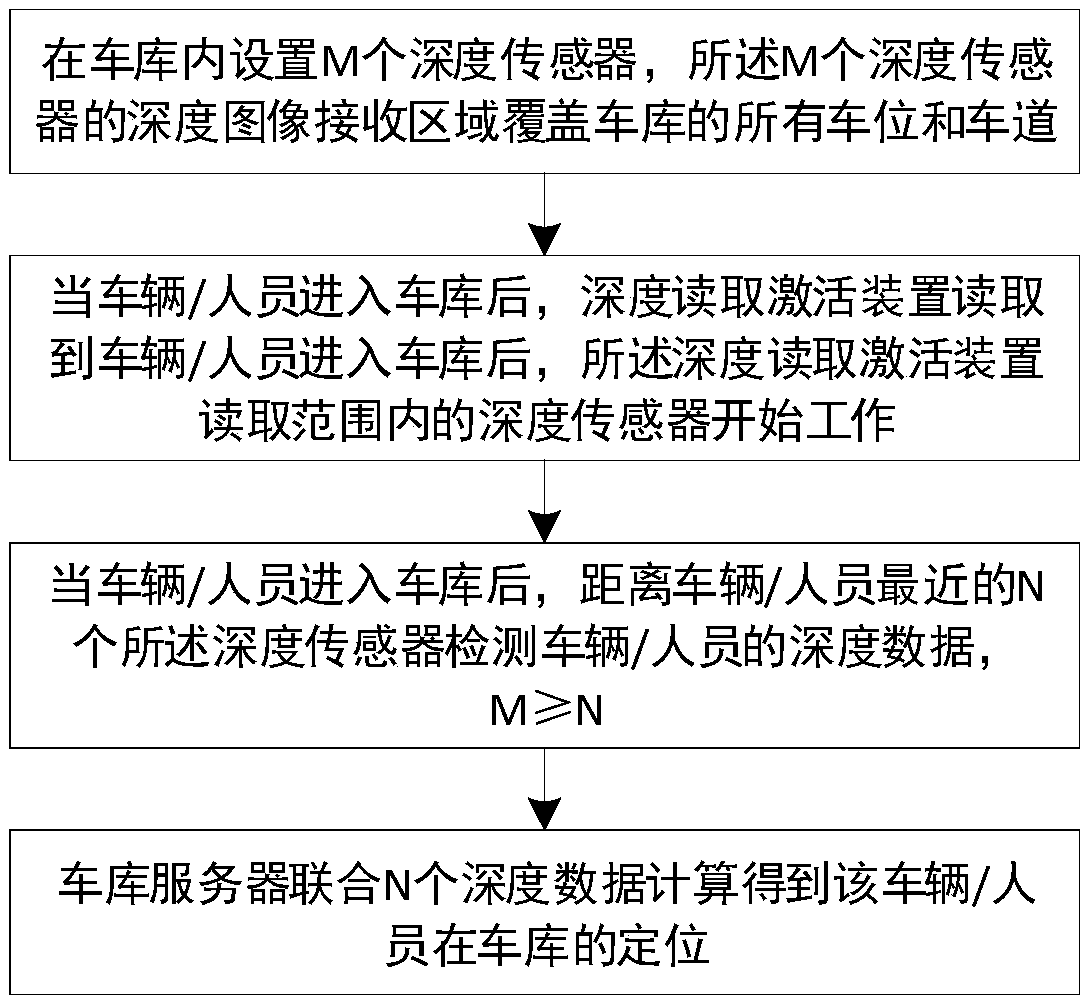
[0063] Embodiment two, such as image 3 As shown, a positioning method based on depth recognition in the garage:
[0064] In the first step, M depth sensors 1 are set in the garage, and the depth data detection area of the M depth sensors 1 covers the driveway and each parking space of the garage;
[0065] In the second step, after the vehicle / personnel enters the garage, after the depth reading activation device reads that the vehicle / personnel enters the garage, the depth sensor within the reading range of the depth reading activation device starts to work;
[0066] In the third step, when the vehicle / person enters the garage, the N depth sensors 1 closest to the vehicle / person detect the depth data of the vehicle / person, M≥N;
[0067] In the fourth step, the garage server calculates the position of the vehicle / person in the garage by combining N pieces of depth data.
[0068] The depth data described in this embodiment is the depth distance of the vehicle / personnel, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More