

Mechanical finger and manipulator including same
A technology of mechanical fingers and manipulators, which is applied in the field of automation equipment, can solve problems such as the easy shaking of the clamping section, the inability to grasp special-shaped workpieces, and the unstable grasping of the manipulator, so as to achieve stable gripping, strong versatility, and stable gripping and the effect of grabbing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
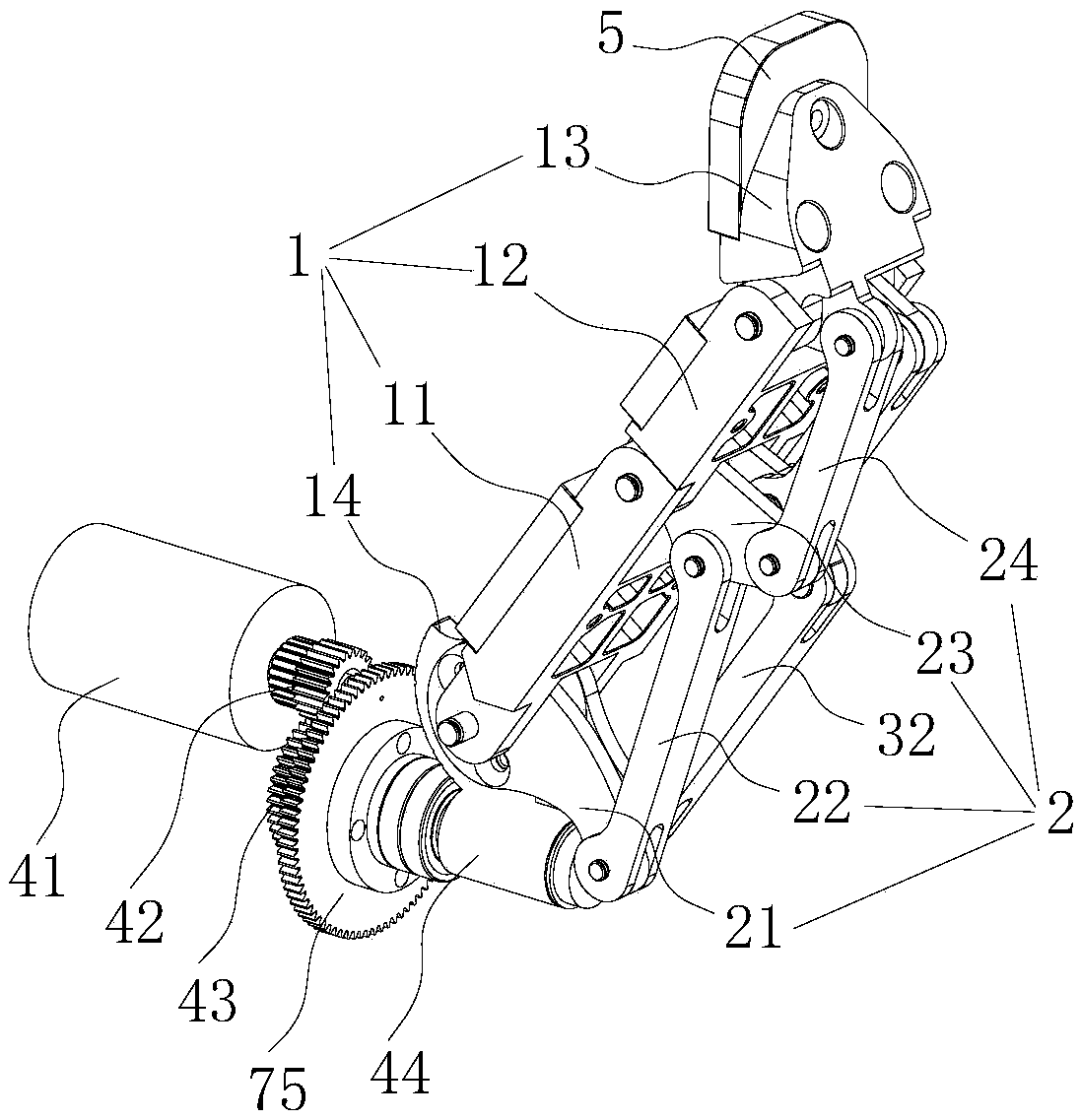
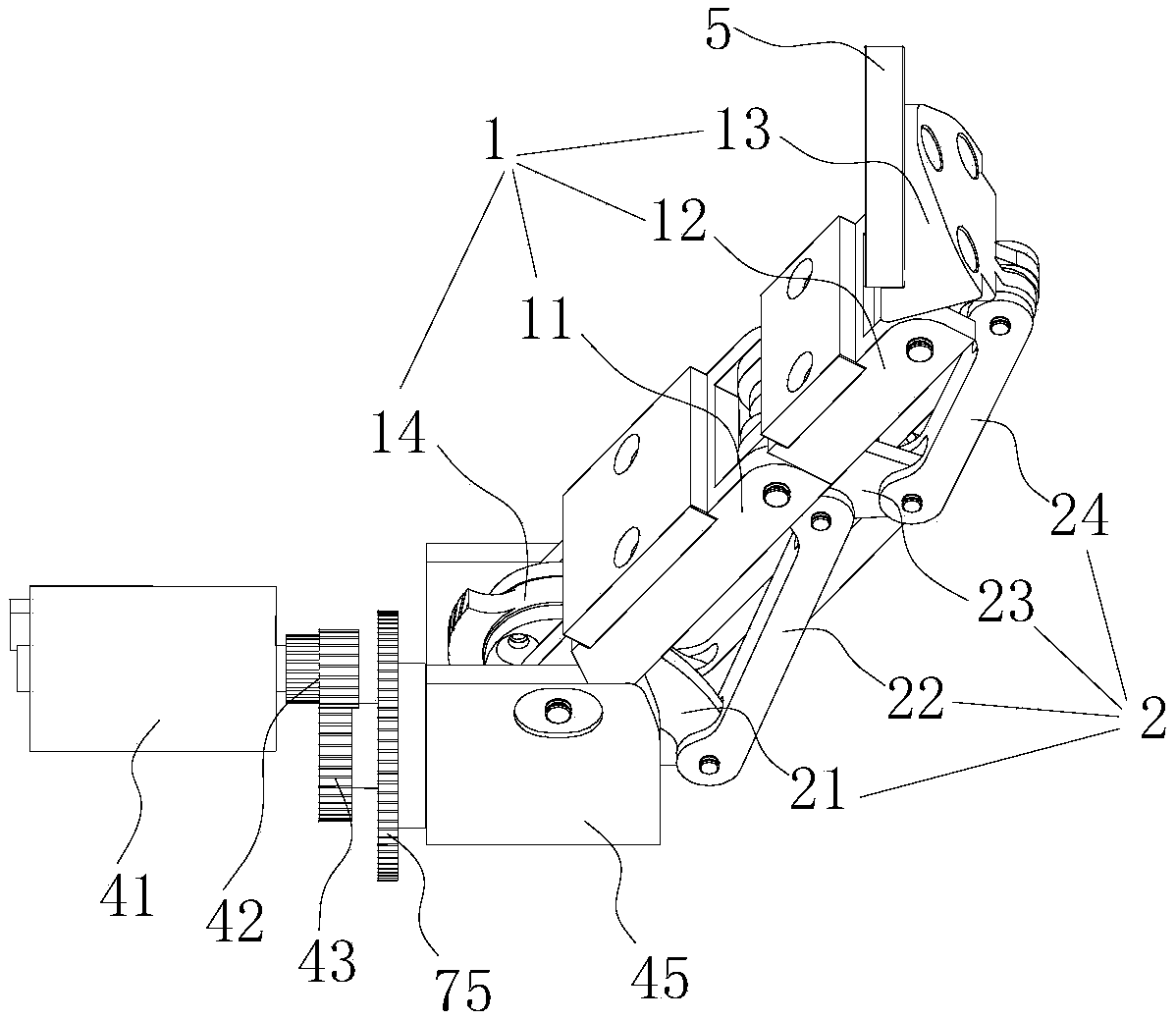
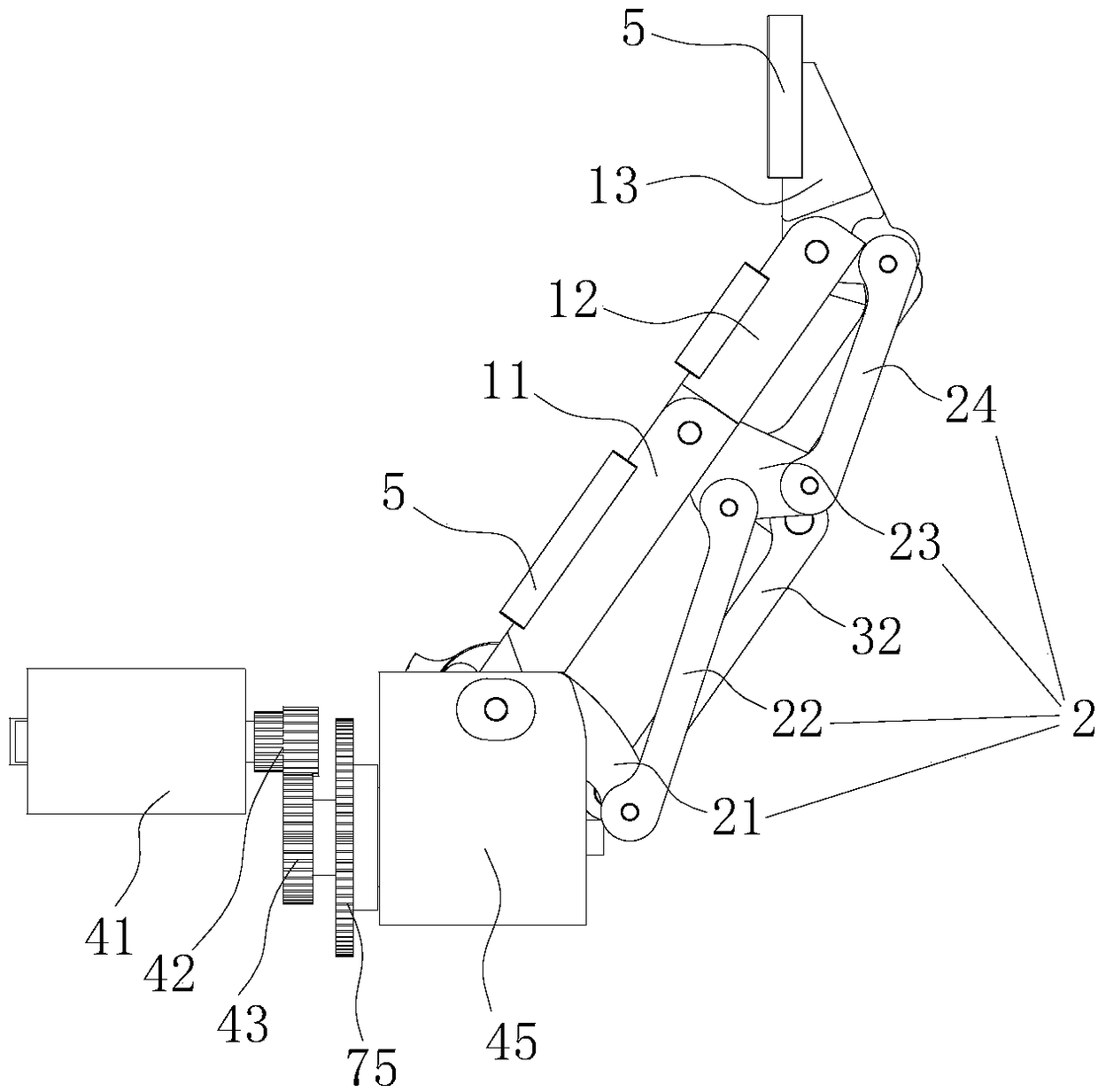
[0039] A mechanical finger, such as Figure 1 to 5 As shown, it includes a knuckle group 1, a guide traction chain 2 that drives the knuckle group 1 to bend, and a self-locking traction chain 3 that drives the knuckle group 1 to bend and self-lock. It also includes a driving guide traction chain 2 and a self-locking chain. The grabbing drive mechanism 4 that locks the traction chain 3 is bent, and the guiding traction chain 2 and the self-locking traction chain 3 are hingedly arranged on one side of the knuckle group 1.
[0040] The implementation of the robotic finger will now be described. The crawl status is like Picture 10 As shown, during use, both the guiding traction chain 2 and the self-locking traction chain 3 are driven by the grabbing drive mechanism 4, and then the knuckle group 1 is turned over under the driving of the guiding traction chain 2 and the self-locking traction chain 3. At this time, the guiding traction chain 2 plays the role of power transmission; when...
Embodiment 2
[0053] A manipulator includes the mechanical finger as described in embodiment 1. It should be understood that the number of manipulator fingers of the manipulator can be set to one or more to achieve envelope grabbing of the special-shaped workpiece. Further, there are three mechanical fingers. It should be noted that the three mechanical fingers can be arranged on the same side, centripetally, and on both sides, etc. The same side setting can realize the envelope capture of the workpiece, and the centripetal setting can realize the alignment. For the clamping action of the workpiece, the two sides can realize the envelope grabbing and clamping action of the workpiece at the same time, and the implementation effect is better.
[0054] Further, such as Figure 6 to 8 As shown, the manipulator also includes a fixing base 6 for fixing the three mechanical fingers. The three mechanical fingers are divided into two left fingers 91 located on one side of the fixing base 6 and anothe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More