

Multi-unmanned aerial vehicle cooperative formation flying management system and method
A multi-UAV and formation flight technology, applied in the field of flight control, can solve the problems of low efficiency, complex operation, and low degree of automation, and achieve the effects of high efficiency, simplified system structure, and high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention provides a multi-UAV cooperative formation flight management system and method, which realizes formation flight management decision-making, path planning and formation control of multi-UAVs under special conditions such as complex environment, incomplete communication and dynamic topology. It improves the execution efficiency and execution effect of multi-UAV tasks such as patrol, detection, target search, and target tracking, and improves the safety and reliability of management at the same time. The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
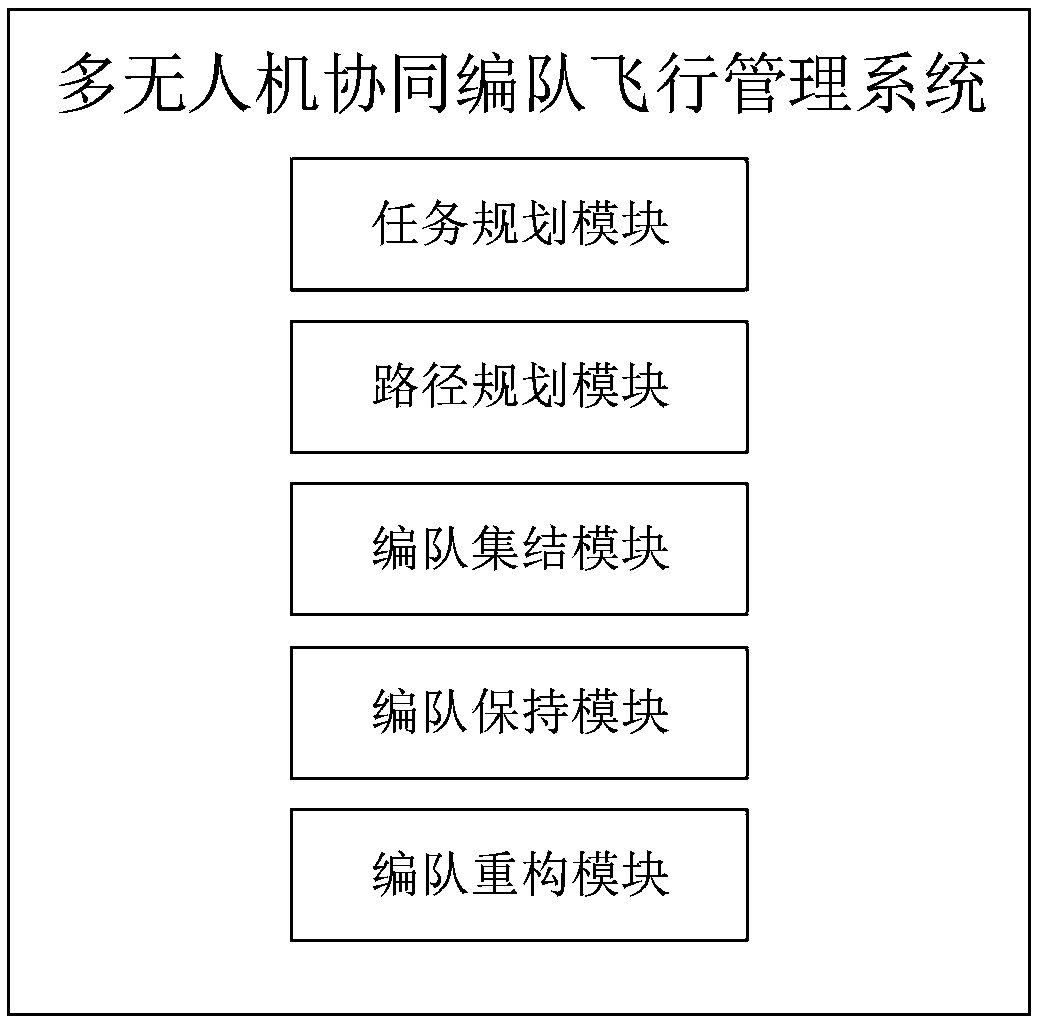
[0036] In one of the examples, as figure 1 As shown, a multi-UAV cooperative formation flight management system, the system includes a mission planning module, a path planning module, a formation assembly module, a formation maintenance module and a formation reconfiguration module that exist on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More