

Actuator of binocular vision positioning system
A technology of binocular vision positioning and binocular vision system, which is applied to manipulators, manufacturing tools, etc., can solve problems affecting production efficiency, high work intensity of workers, and high requirements for the relationship between workpieces and tooling, so as to improve production efficiency and shorten the production time. The effect of reducing transit time and reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further explained below in conjunction with specific examples.
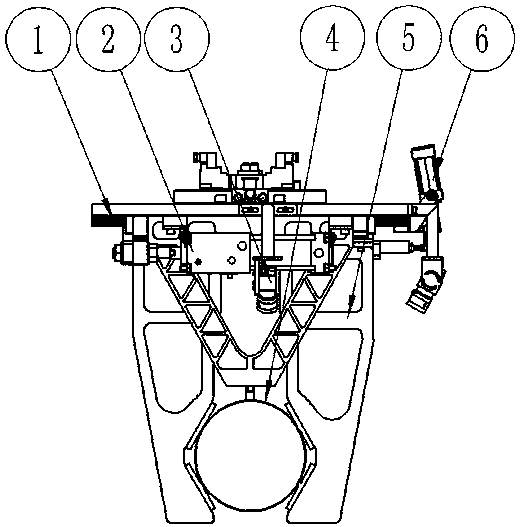
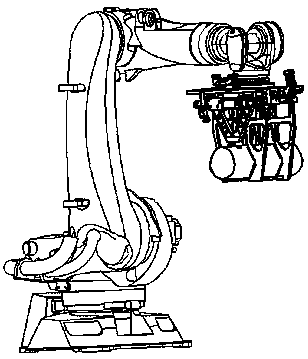
[0013] Such as Figure 1-3 As shown, the actuator of the binocular vision positioning system includes a binocular vision system and a clamping mechanism. The binocular vision system,
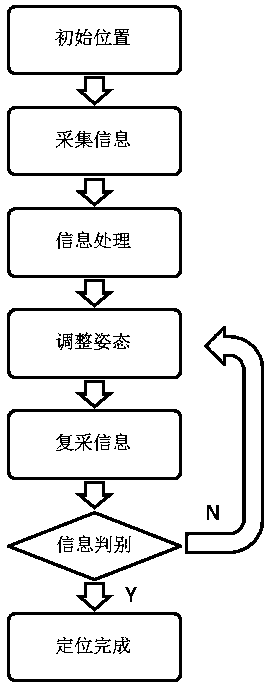
[0014] The binocular vision system consists of two cameras 3 and a control system. The robot moves the actuator to the initial position of the workpiece. The camera collects the fixed feature point information on the surface of the workpiece, and transmits the initial position information of the workpiece to the control system. The control system sends the camera The transmitted information is processed, the positioning error and compensation amount are calculated, and then the robot is driven to adjust the attitude; the relative position information of the workpiece is collected according to the adjusted attitude, and the control system judges whether the re-acquisition information meets the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More