

Bouncing leg based on incomplete set of gears
A gear set and complete technology, applied in the field of bouncing robots, can solve problems such as the inability to adjust the bouncing height and take-off angle, and the inability to guarantee the stability of bouncing, so as to achieve the effect of achieving continuity, increasing efficiency, and increasing initial speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Further description will be given below in conjunction with the embodiments shown in the accompanying drawings.
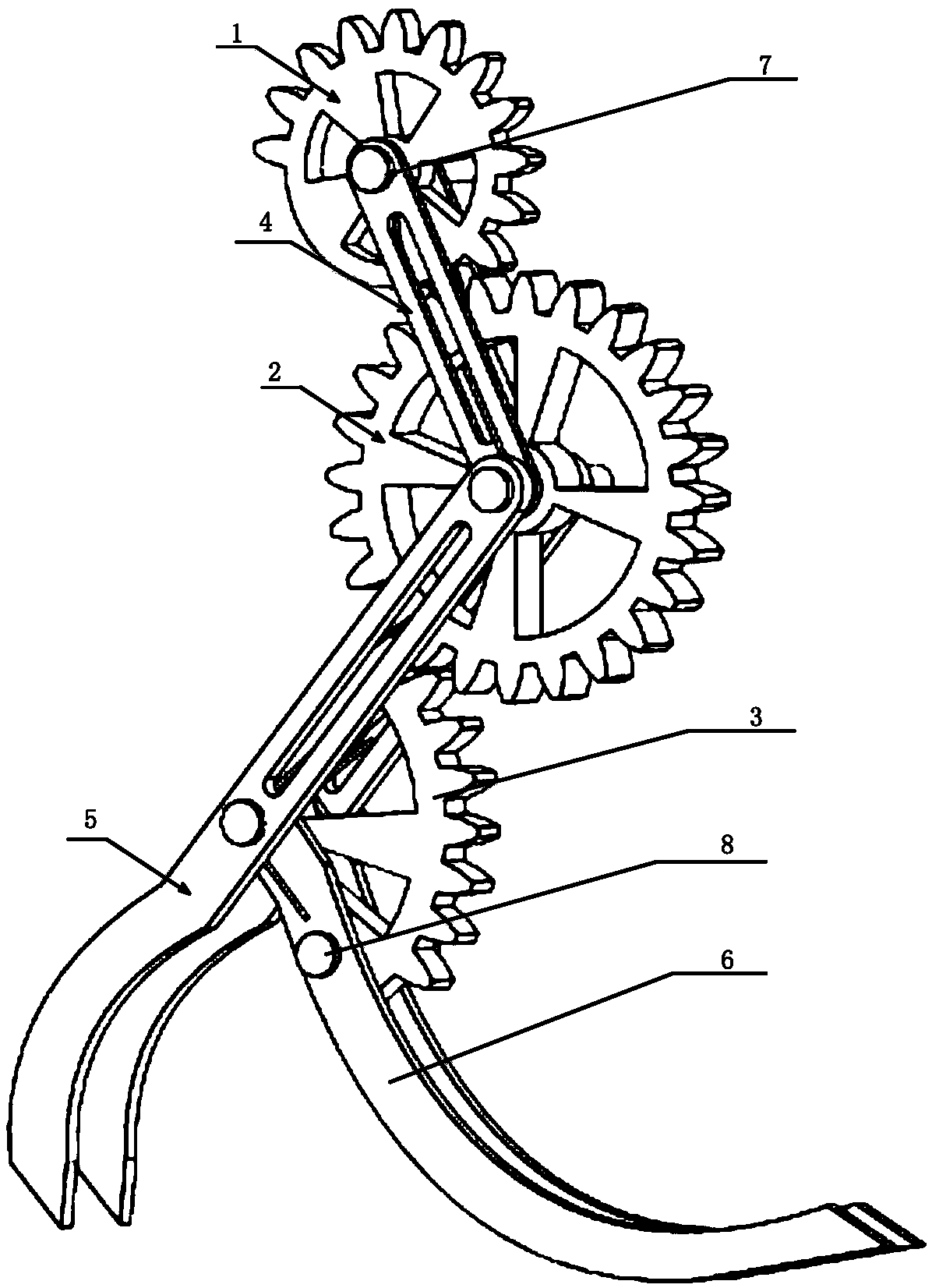
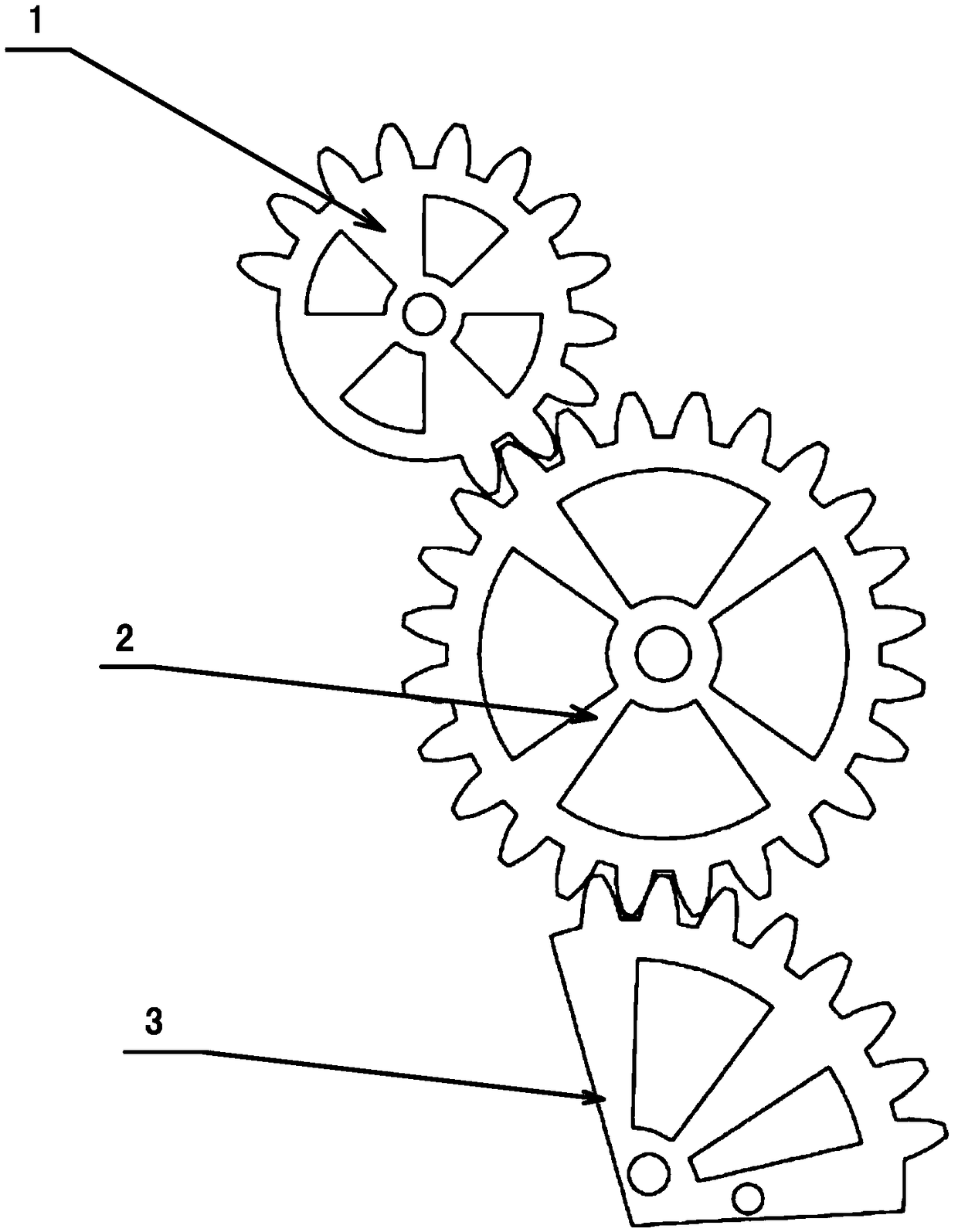
[0026] The jumping leg based on the incomplete gear set as shown in the figure includes a frame, an energy storage spring installed on the frame, and a transmission assembly that presses on the frame to deform the energy storage spring to store energy or release energy for jumping;
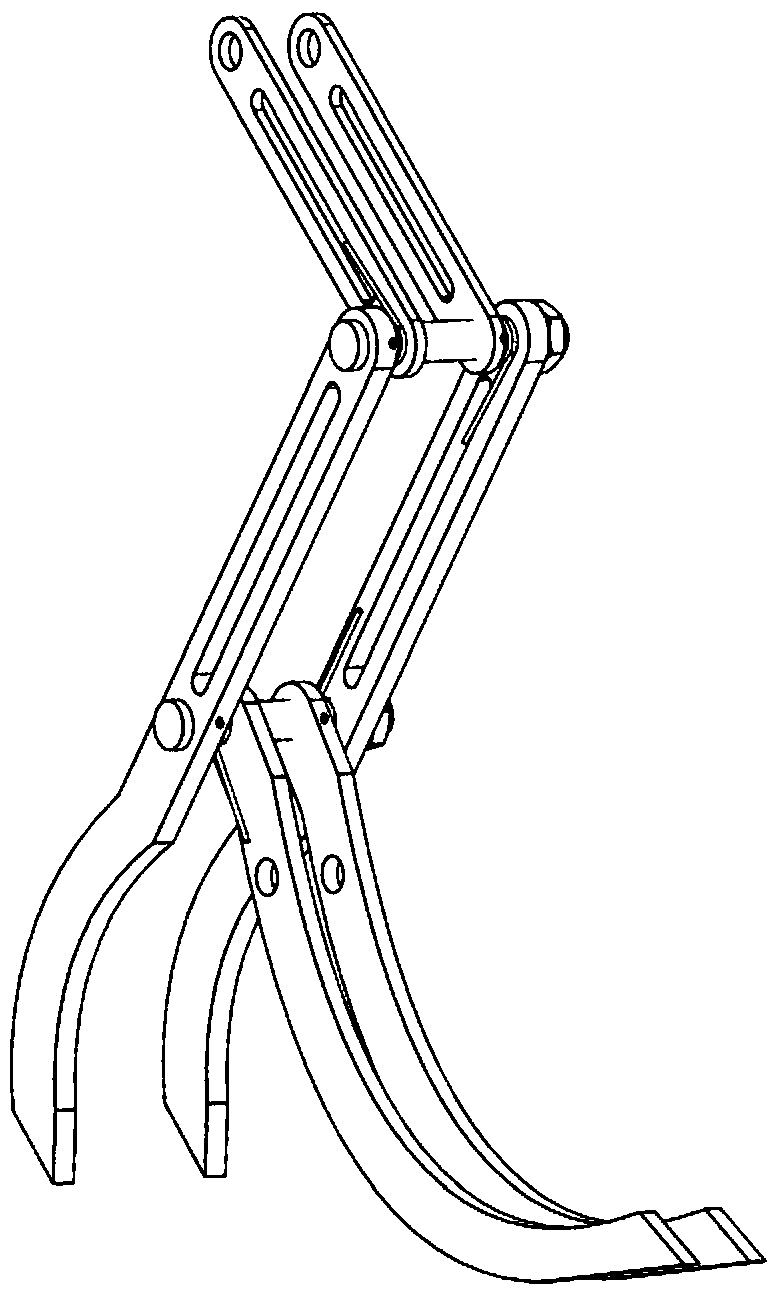
[0027] In the frame, the pointed forefoot 5 and the J-shaped rear foot 6 are hinged to form a main body that stands firmly on the ground, and the U-shaped connector 4 is hinged at the top of the pointed forefoot.
[0028] The energy storage spring includes a lower joint torsion spring 10 and an upper joint torsion spring 9; the lower joint torsion spring is installed at the hinge point of the pointed forefoot and the J-shaped rear foot, and the two ends of the spring apply force to the pointed forefoot and the J-shaped rear foot respectively. Type hind foot ( Figure 4 It can b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More