Unmanned aerial vehicle-unmanned vehicle cluster model time-varying formation control method and unmanned aerial vehicle-unmanned vehicle cluster model time-varying formation control system
A control method and unmanned aerial vehicle technology, applied in control/adjustment system, non-electric variable control, vehicle position/route/height control, etc., can solve problems such as difficult direct application of formation control methods and differences in state dimensions, and achieve good results Scalability and self-organization, coping with rapid changes, and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0084] The effectiveness of the method proposed by the present invention is verified below through a specific example of formation control of UAV-unmanned vehicle heterogeneous cluster system. The specific implementation steps of this example are as follows:
[0085] (1) UAV-UAV heterogeneous cluster system setup
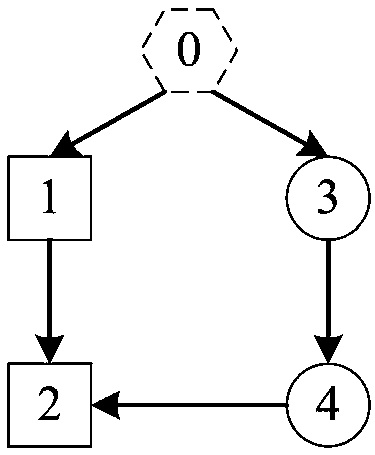
[0086] Consider a heterogeneous swarm system composed of 2 UAVs (numbered 1, 2) and 2 unmanned vehicles (numbered 3, 4), and its topology is as follows figure 2 shown. UAVs and unmanned vehicles perform air-ground collaborative reconnaissance missions in the form of rotating circular formations. The two UAVs fly at a fixed altitude, so in this example, only the formation tracking control problem in the XY plane should be considered. Set the model parameters for the virtual leader to x 0 (0)=[0,0.3,0,0.2] T , then the virtual leader will move in a straight line at a uniform speed in the XY plane.
[0087] (2) Expected time-varying formation design
[0088...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com