

An ultrasonic motor speed control method and device based on variable gain iterative learning
An ultrasonic motor and iterative learning technology, applied to piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve problems such as convergence speed and steady-state characteristics, and achieve Effects of increasing convergence speed and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
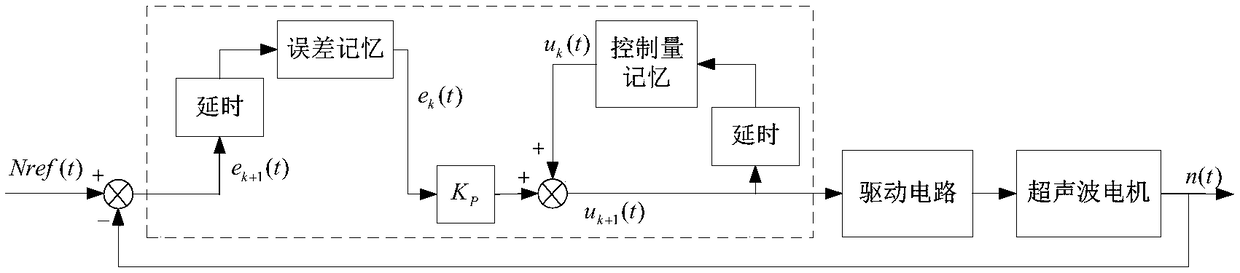
[0040] Such as figure 1 As shown, the ultrasonic motor speed control method based on the P-type iterative learning controller in the prior art is as follows: the ultrasonic motor speed given value Nref(t) is made a difference with the ultrasonic motor speed actual value n(t) to obtain the ultrasonic motor speed Error value e k+1 (t), the ultrasonic motor speed error value e k+1 (t) Through the P-type iterative learning controller, the iterative learning control output u is obtained k+1 (t), will iteratively learn to control the output u k+1 (t) As a given value of the frequency of the ultrasonic motor, it is used to act on the ultrasonic motor. Among them, the expression of the P-type iterative learning controller is shown in formula (1).
[0041] The method of this embodiment is in figure 1 Based on the improvement, the improved control block diagram is as follows Figure 5 As shown, its specific improvement points are in Figure 5 Enclosed in a dashed box.
[0042] f...
Embodiment 2
[0053] The difference of embodiment 1 is that the method of the present invention is applied as Figure 4 In the ultrasonic motor speed control based on the improved P-type iterative learning controller shown, that is, the learning gain K in this control method p It is also adaptive. The larger the actual speed value of the ultrasonic motor, the smaller the learning gain, and the smaller the actual speed value of the ultrasonic motor, the larger the learning gain. Specific Learning Gain K p The method for obtaining the value of can refer to Method Embodiment 1, which will not be repeated here.
[0054] Device embodiment
[0055] This embodiment provides an ultrasonic motor speed control device based on variable gain iterative learning, the device is a device with data processing capabilities such as a computer, the device includes a processor and a memory, and the two are directly or indirectly electrically connected , to realize data transmission or interaction. The proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More