Sliding pair driven omni-directional large-rotating angle high-precision posture adjustment robot
A technology of moving pairs and large turning angles, applied in the directions of manipulators, manufacturing tools, hand-held tools, etc., can solve problems such as difficulty in popularization and application, and achieve the effect of symmetrical structure, reduced gap, and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
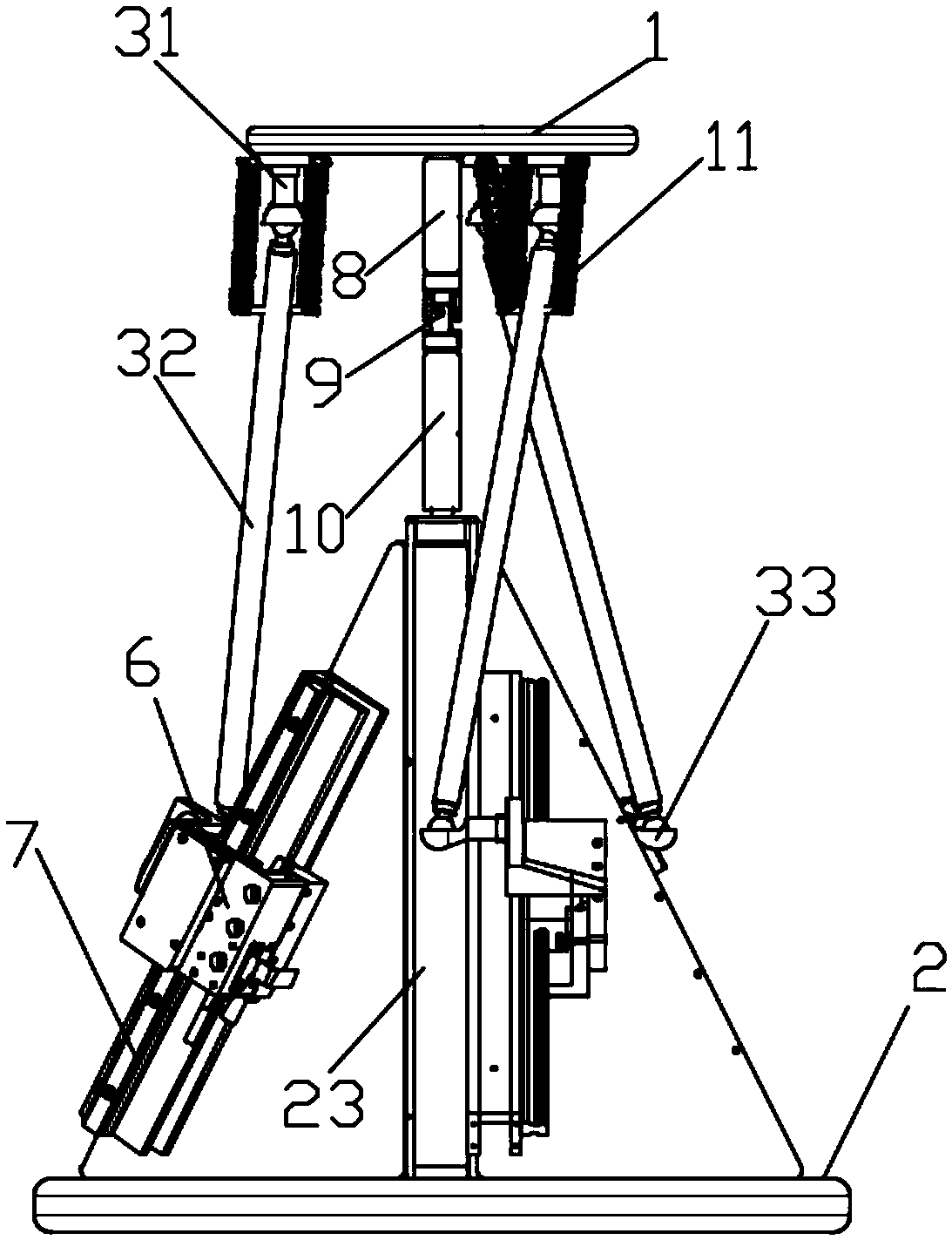
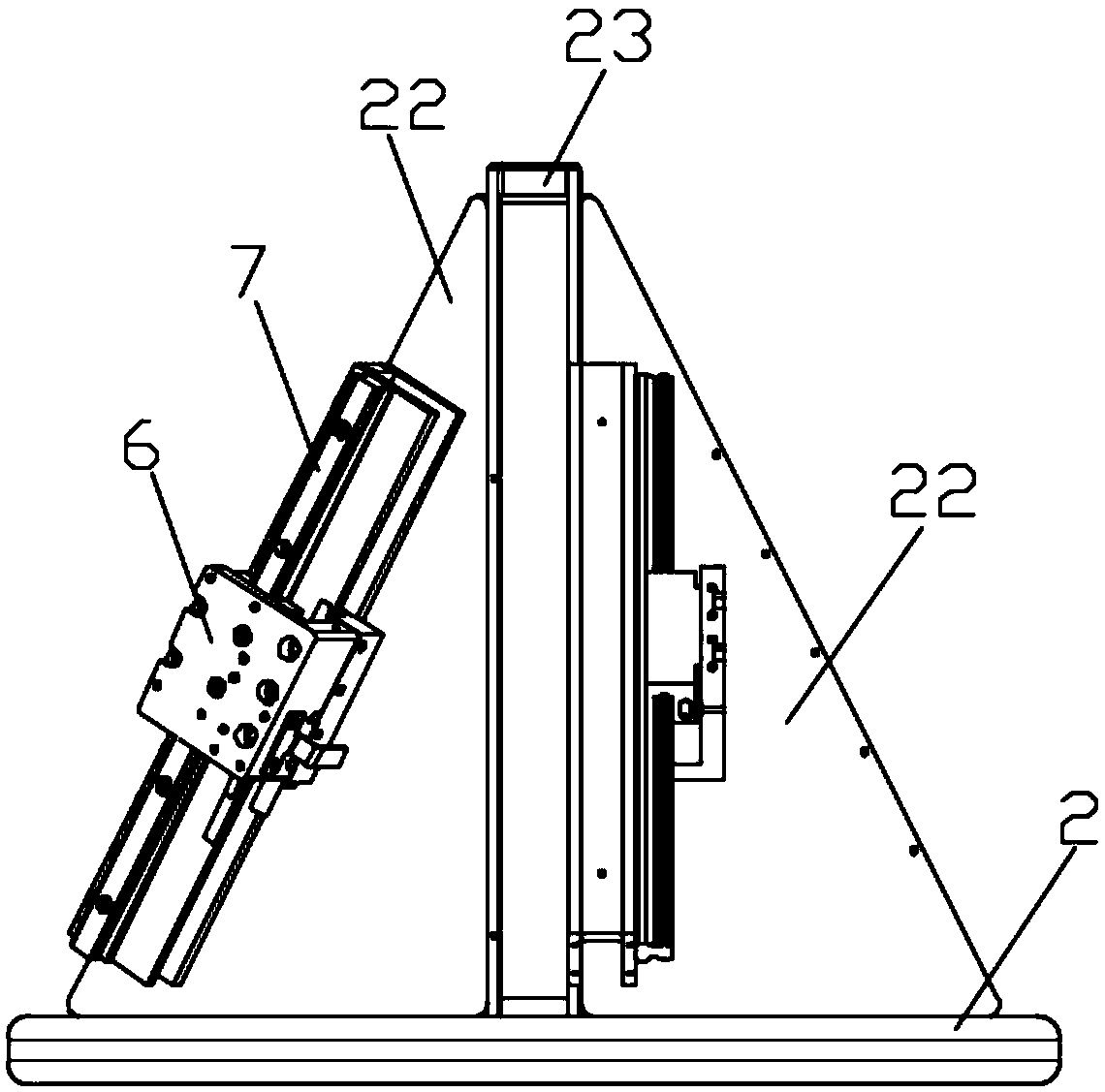
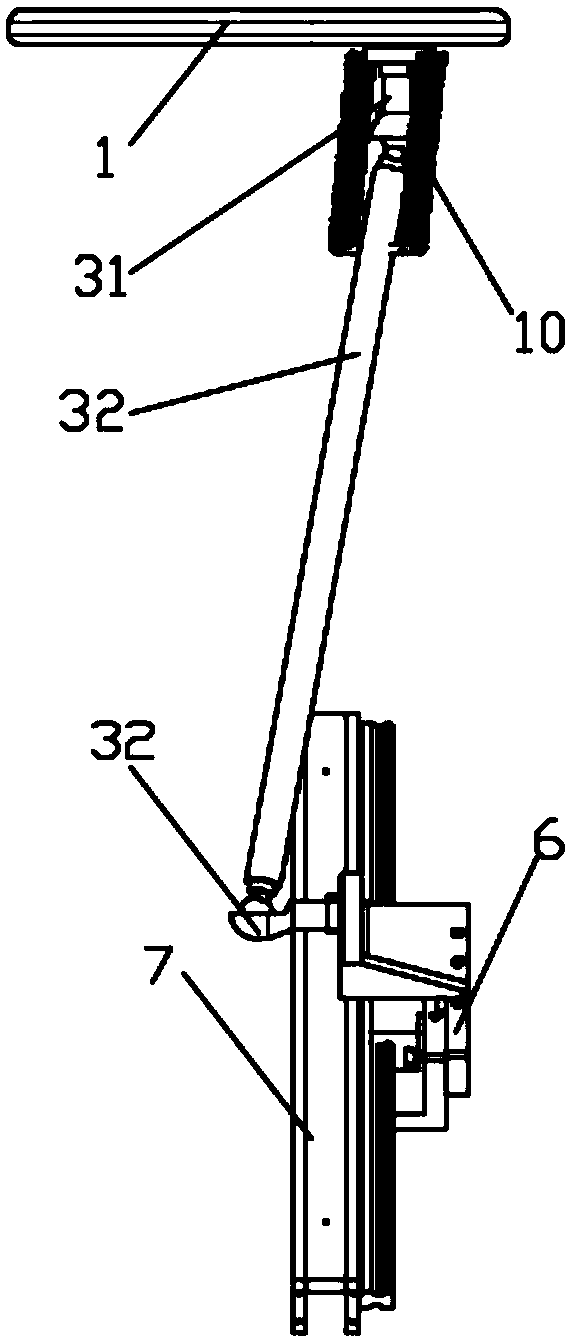
[0023] Such as Figure 1-Figure 3 As shown, an omnidirectional large-angle high-precision attitude adjustment robot driven by a moving pair of the present invention includes a movable platform 1, a base 2, a connecting assembly, a moving pair, a center rotating branch chain and a controller.
[0024] See details Figure 1-Figure 3 , the movable platform 1 in this embodiment can be installed or provided with functional tool components, preferably a jig for fixing 3C product materials. The shape of the movable platform 1 is circular or triangular, and it can also be other irregular types. The platform 1 is an inscribed triangle, and a group of connecting components are respectively arranged on the centers of the three sides. The connecting components make the movable platform 1 rotate in multiple directions to drive the movement of the installa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More