

Multi-robot formation runtime-prolonging method based on pilot switching
A multi-robot, robot technology, applied in instruments, two-dimensional position/channel control, non-electric variable control and other directions, can solve the problems of high sensor usage, high communication frequency, and easy endurance problems, so as to improve efficiency and feasibility. performance, improve battery life, and ensure stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
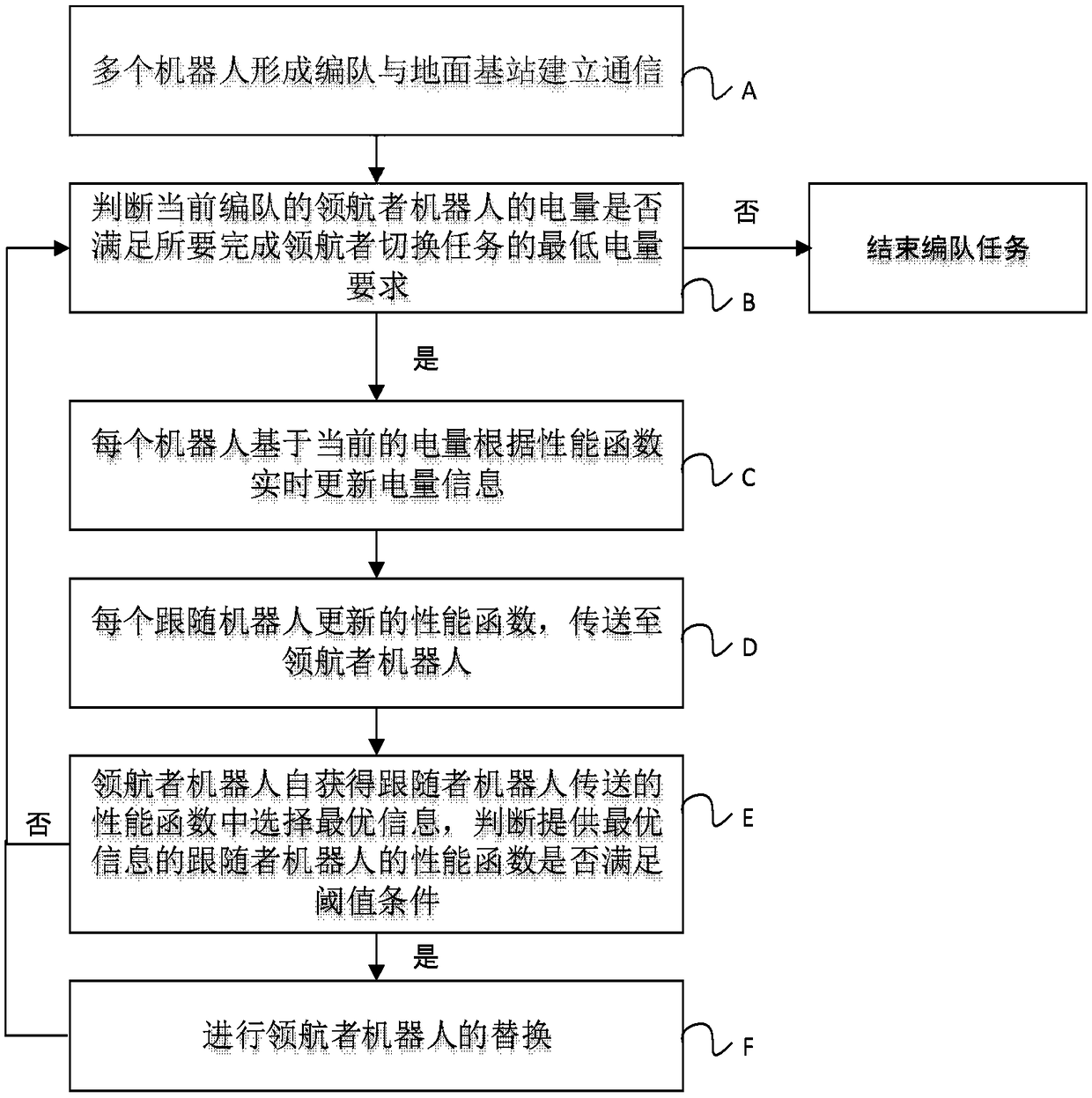
[0053] The disclosure provides a multi-robot formation endurance method based on leader switching, including: forming a formation of multiple robots to establish communication with a ground base station; judging whether the power of the leader robot in the current formation meets the minimum power required to complete the leader switching task If the requirements are not met, the formation task will end, and if it is satisfied, it will continue to execute; each robot will update the power information in real time based on the current power according to the performance function and send it to the leader robot; the leader robot selects the optimal information in the performance function, judges Whether the performance function meets the threshold condition, returns to the loop if it does not meet the threshold condition, and selects the follower robot that provides the best information as the leader robot to be replaced if the threshold condition is met; finally, replace the leade...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More