Detecting and tracking method with water surface unmanned boat for shallow water pipeline
An unmanned boat and pipeline technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve the problems of low efficiency and high cost of ROV detection pipeline, and achieve clear images. , the effect of easy identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
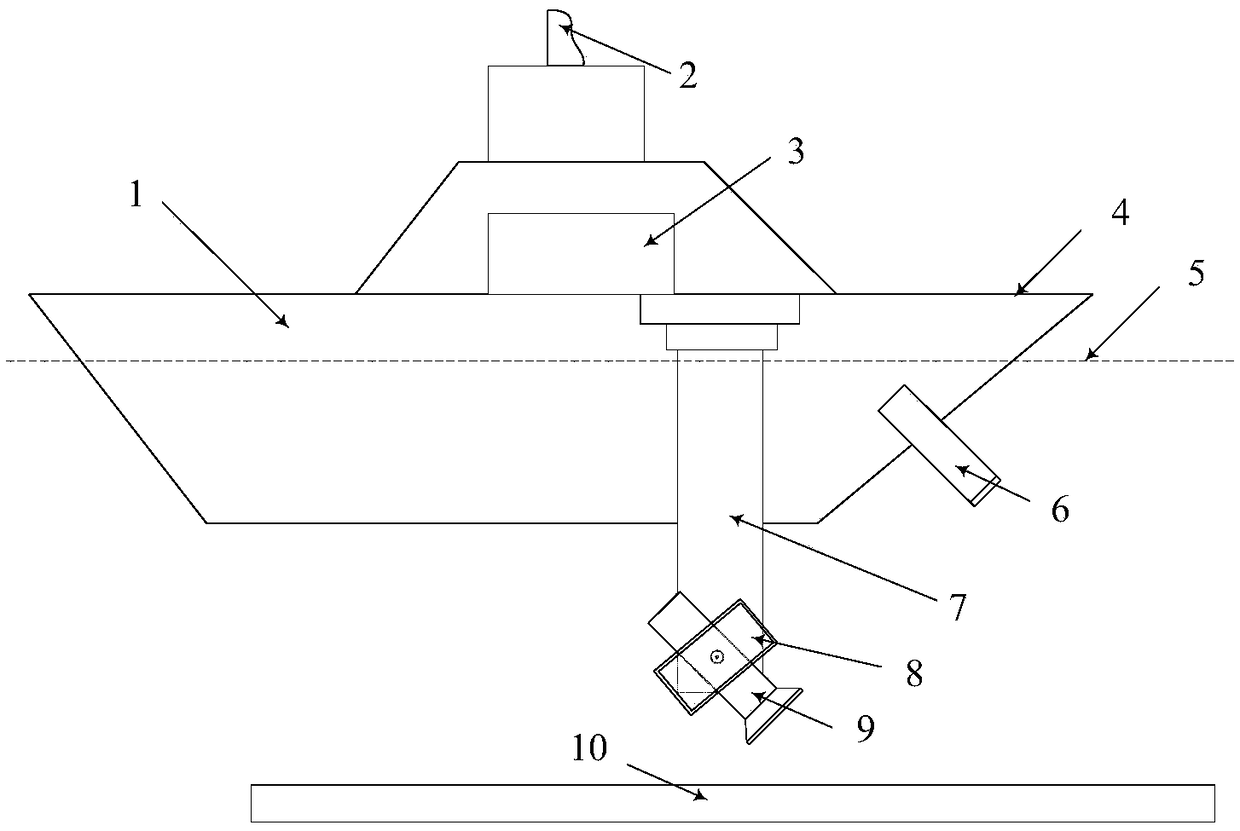
[0026] 1. Step (1) The distortion correction process in the optical detection module at the position of the pipeline 10, the required distortion parameters are obtained by calibration of the underwater camera 9, and the distortion correction formula is
[0027]
[0028]
[0029] In the formula, (u d ,v d ) is the projected position of the spatial point on the image plane, r is the radial distance from the projected point to the center of the imaging plane, (u, v) is the position of the pixel after distortion correction. (u 0 ,v 0 ) is the distortion center of the camera, k 1 ,k 2 ,k 3 is the radial distortion coefficient, p 1 ,p 2 is the tangential distortion coefficient, these parameters belong to the internal parameters of the camera, and need to be obtained through the camera calibration test.
[0030] 2. Step (1) The image den...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com