

Method and system for compensating gravity center deviation of unmanned aerial vehicle
A technology of center of gravity offset and compensation method, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problems of inconsistent geometric center, unsatisfactory control effect, affecting user flight experience and operability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
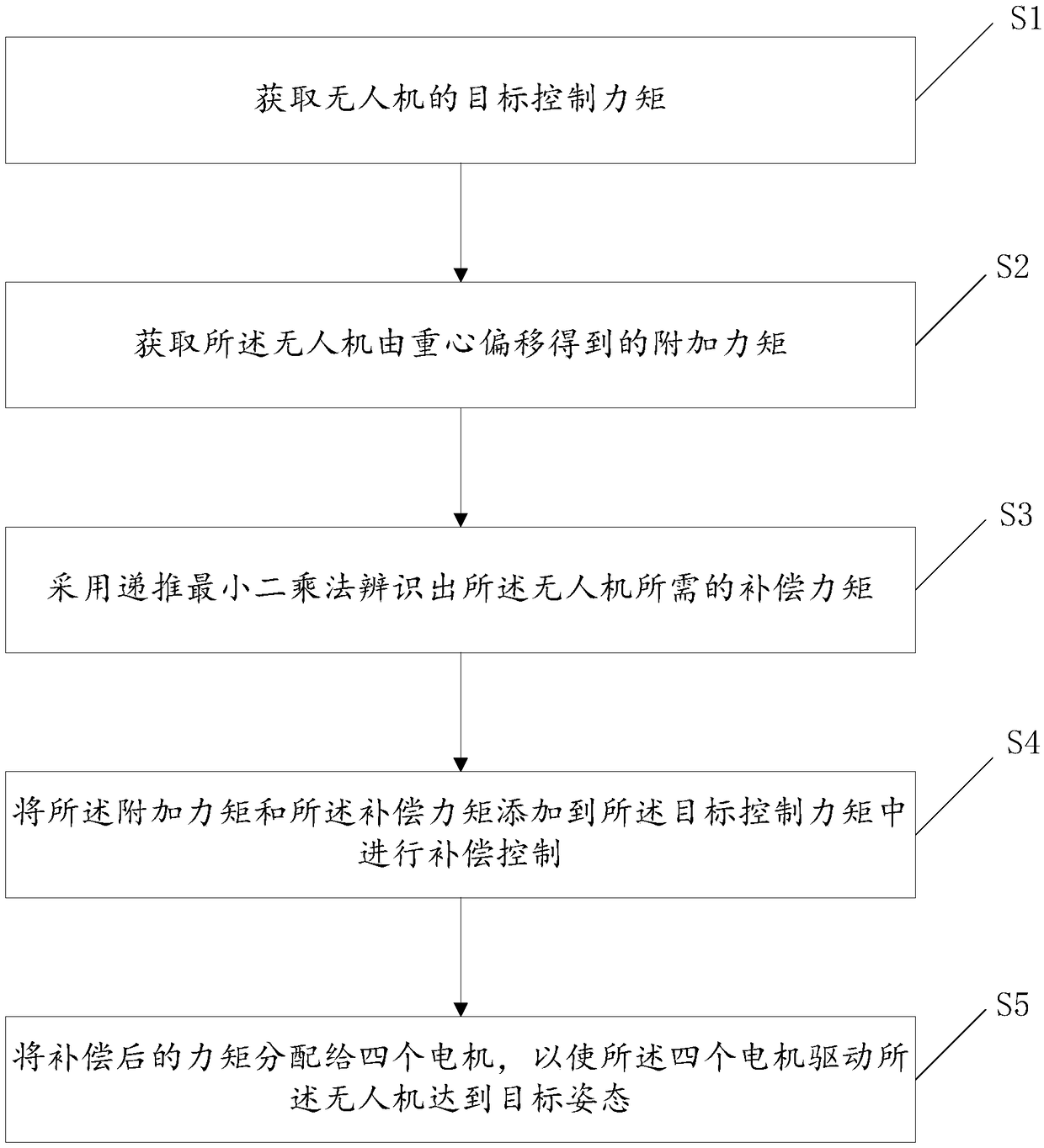
[0066] The embodiment of the present invention provides a compensation method for center of gravity offset of UAV, see figure 1 , the method includes:
[0067] S1. Obtain the target control moment of the UAV;
[0068] S2. Obtain the additional moment obtained by the center of gravity offset of the drone;
[0069] S3. Using the recursive least squares method to identify the compensation torque required by the drone;
[0070] S4. Add the additional torque and the compensation torque to the target control torque to perform compensation control;
[0071] S5. Distributing the compensated torque to the four motors, so that the four motors drive the UAV to reach the target attitude.
[0072] It should be noted that after the center of gravity of the UAV is shifted, the additional moment obtained by the UAV from the shift of the center of gravity and the target control moment of the UAV are obtained, and the compensation required by the UAV is obtained by the recursive least square...
Embodiment 2
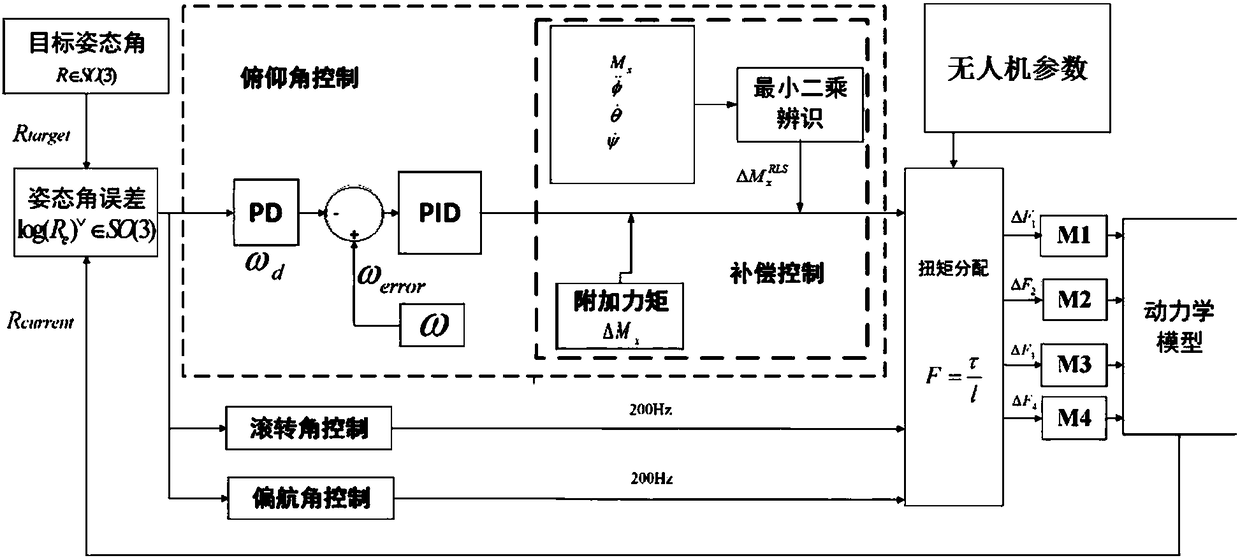
[0125] An embodiment of the present invention provides a compensation system for the offset of the center of gravity of the UAV, which can realize all the processes of the compensation method for the offset of the center of gravity of the UAV, see Figure 6 , the compensation system for the deviation of the center of gravity of the drone includes:
[0126] The first obtaining module 1 is used to obtain the target control torque of the UAV;
[0127] The second acquisition module 2 is used to acquire the additional moment obtained by the offset of the center of gravity of the drone;
[0128] The identification module 3 is used to identify the compensation torque required by the UAV by using the recursive least squares method;
[0129] a compensation module 4, configured to add the additional torque and the compensation torque to the target control torque to perform compensation control; and,
[0130] The distribution module 5 is configured to distribute the compensated torque ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More