

Self-propelled multi-arm robot cleaning machine
A robotic and self-propelled technology, which is applied in the direction of abrasive jetting machine tools, used abrasive processing devices, abrasives, etc., can solve the problems of fixed-point shot blasting, inability to collide with structures, and inflexibility, etc., to achieve a wide range of cleaning operations, Meet environmental protection requirements, highly automated effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
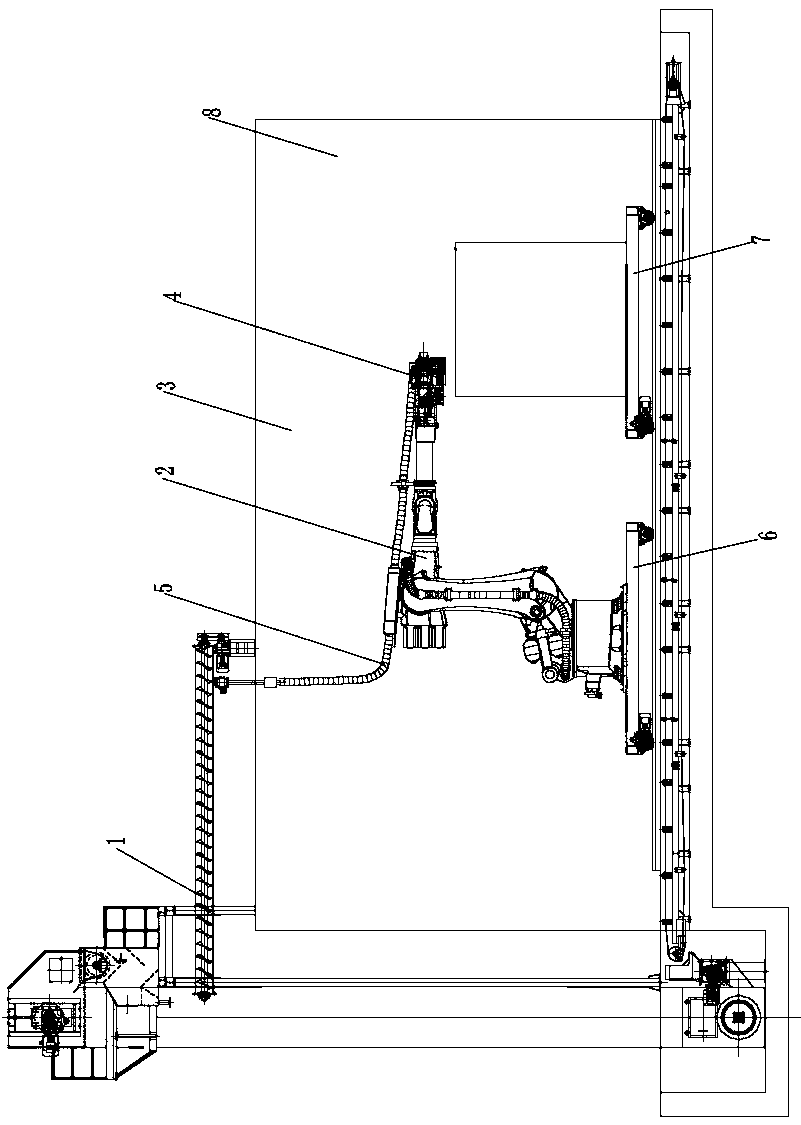
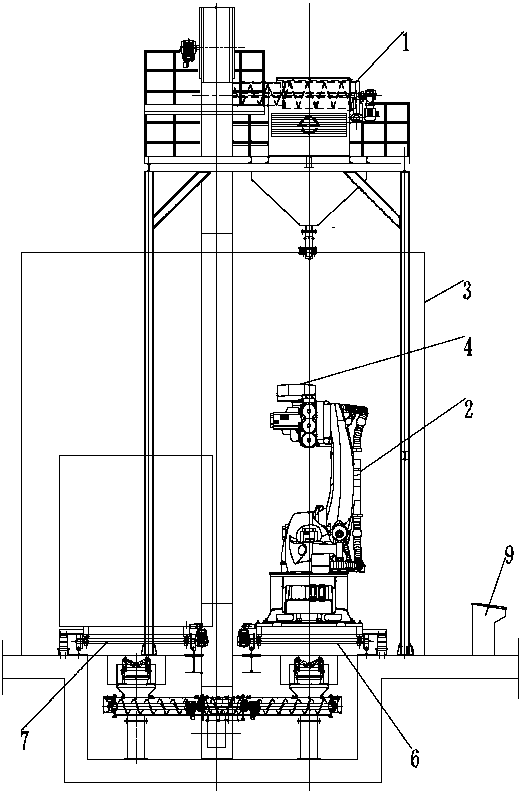
[0020] see Figure 1~2 , in an embodiment of the present invention, a self-propelled multi-arm robot cleaning machine includes a horizontally arranged support installation plate, a support installation column is vertically arranged on the left end of the support installation plate, and a vertical support installation column is arranged on the upper end of the support installation plate. There is a shot blasting chamber 3, and two sets of moving guide rails are horizontally arranged on the front and back of the support mounting plate in the shot blasting chamber 3, and a workpiece moving trolley 7 is horizontally arranged on the upper end of the moving guide rails at the front end, and a workpiece is installed on the upper end of the workpiece moving trolley 7. , and the lower end of the workpiece mobile trolley 7 is equipped with moving guide wheels before and after the moving guide rails, the upper end of the moving guide rails at the rear end is horizontally provided with a r...
Embodiment 2
[0022] On the basis of Embodiment 1, a dust removal system 8 is integrated at the upper right end of the shot blasting chamber 3, and the dust removal system 8 removes dust generated by shot blasting to meet environmental protection requirements.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More