

Wall-climbing robot used for large radian curved wall
A wall-climbing robot with a large arc technology, which is applied in the fields of motor vehicles, transportation and packaging, can solve the problems of poor movement efficiency, high production cost, and complicated results, and achieves the advantages of convenient control, compact device structure, and easy popularization and promotion. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Specific embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
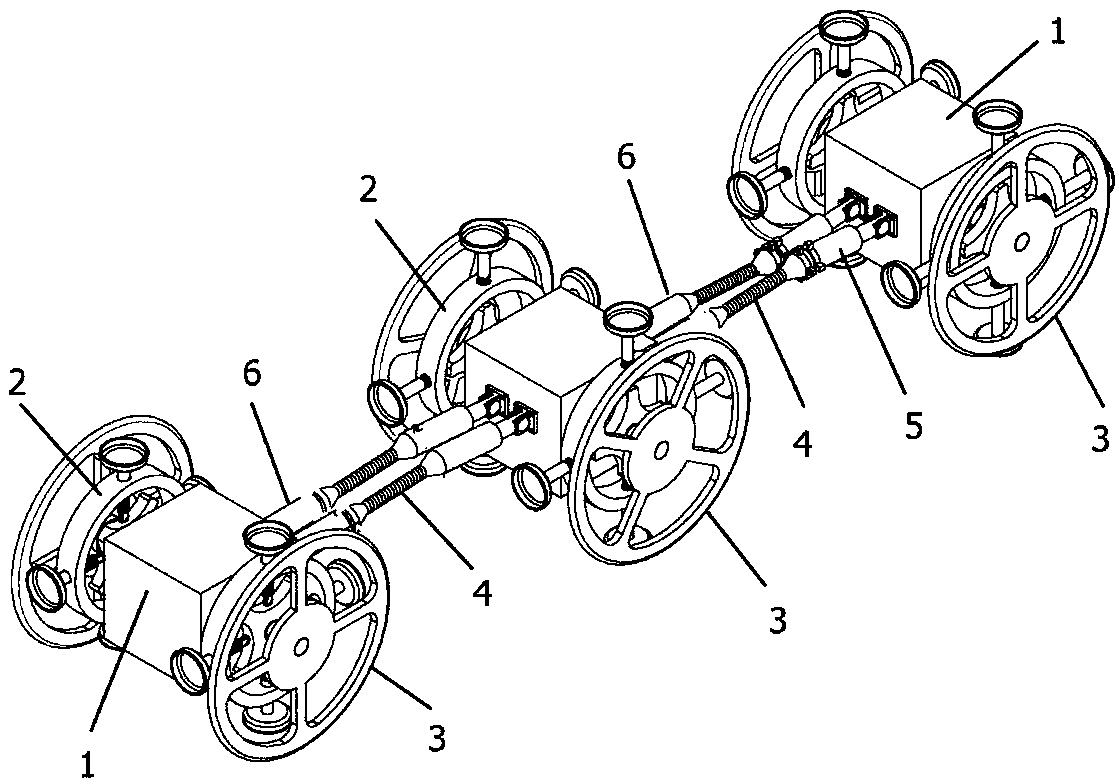
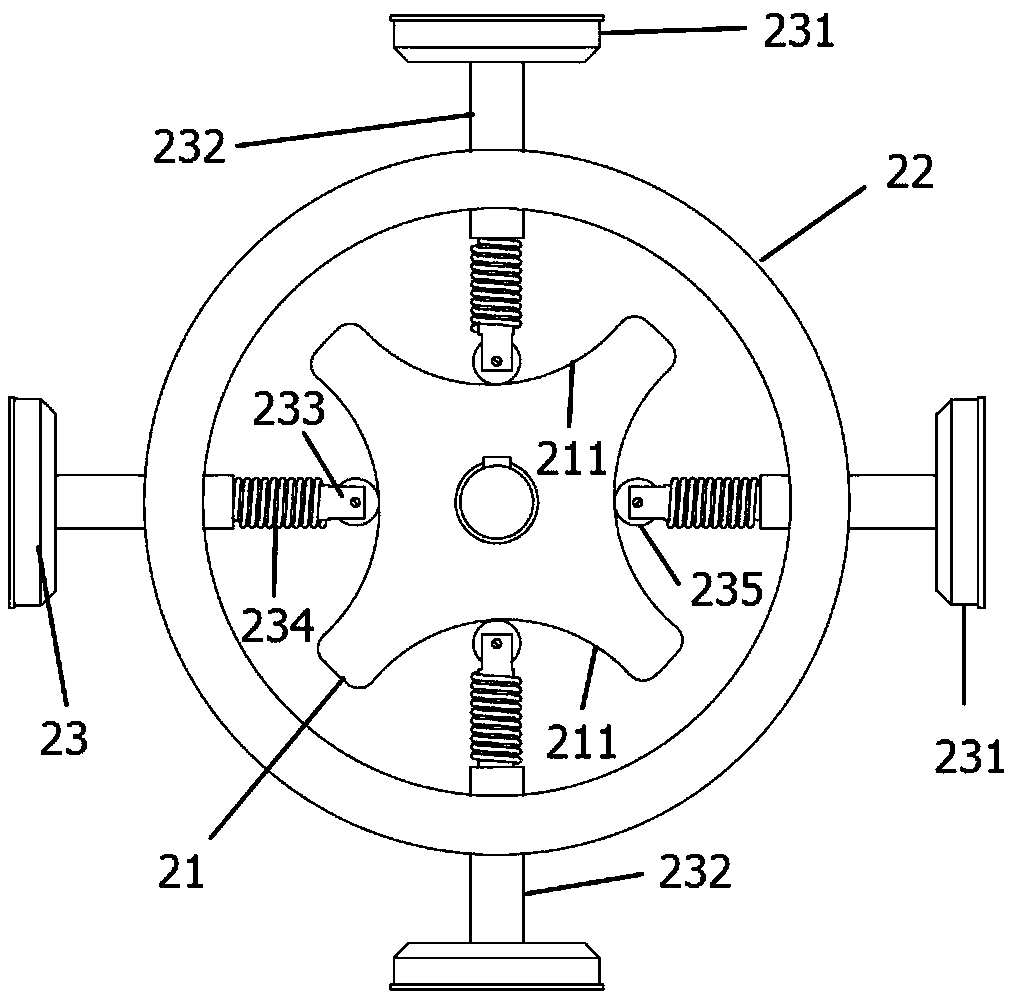
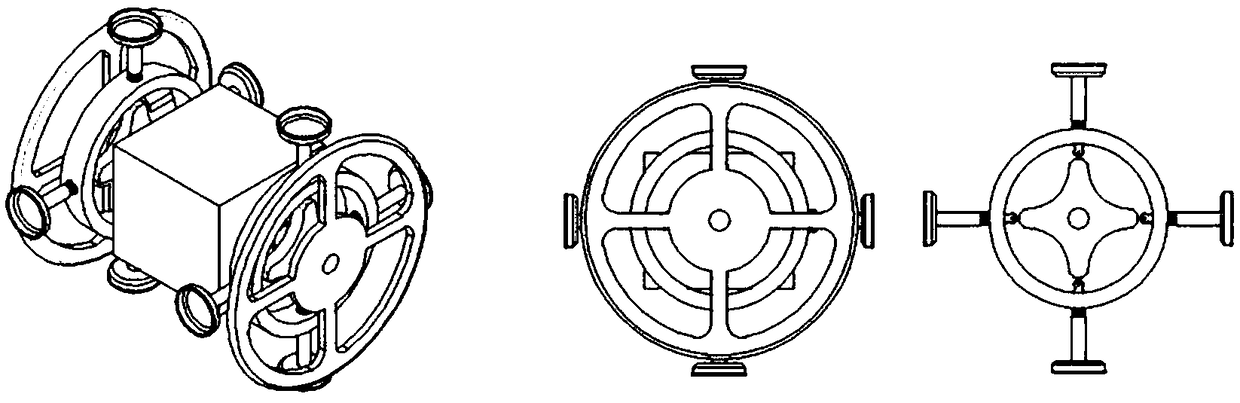
[0031] Refer to attached figure 1 and 2 , the present invention provides a wall-climbing robot for large arc curved walls, including a plurality of car bodies 1, two adjacent car bodies 1 are connected by a push-pull mechanism, the first car body and the last car body There is no push-pull mechanism between them, and a control unit is arranged inside the car body 1, and an adsorption unit is arranged at each end. The control unit is used to control the adsorption unit to complete the adsorption and desorption between the adsorption unit and the wall surface, and control the push-pull mechanism to drive The car body 1 moves. The car body 1 can be set as a cube, the adsorption unit is arranged at the left and right ends of the cube, the push-pull mechanism is arranged at the front and rear ends of the cube, and the control unit is arra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More