

Manufacturing method of multi-feature fusion map facing autonomous vehicle
A self-driving car and multi-feature fusion technology, applied to road network navigators and other directions, can solve problems such as insufficient positioning accuracy and stability of point cloud maps, insufficient safety of unmanned driving, and inconsistent data frequency, etc., to achieve The effect of rich attributes, improved stability and accuracy, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
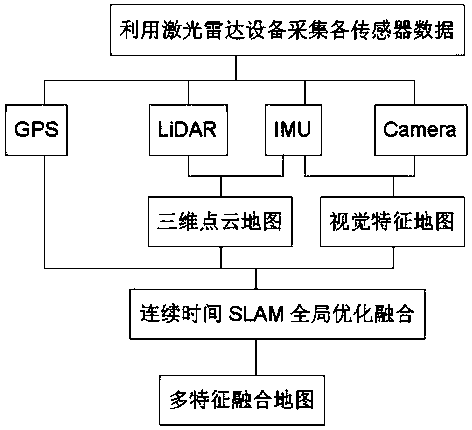
[0031] The multi-feature fusion map making method for unmanned vehicles given in the embodiment of the present invention, such as figure 1 As shown, the lidar equipment equipped with unmanned vehicles is used to collect a variety of sensor data, including GPS (global positioning system) data, LiDAR (lidar) data, IMU (inertial measurement unit) data and high-definition industrial camera data, using LiDAR Data and IMU data generate a 3D point cloud map, use camera data and IMU data to generate a visual feature map, and finally use GPS data to complete global control and global optimization at the same time to produce an accurate and attribute-rich multi-feature fusion map.
[0032] The embodiment of the present invention is oriented to the multi-feature fusion map making method of unmanned vehicles, comprising the following steps:
[0033] Step 1. Use the vehicle-mounted lidar device to collect data from each sensor
[0034] In the field data collection process, after selecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More