

Object detection method, device, apparatus, storage medium and vehicle
An object detection and object technology, applied in the field of sensors, can solve the problems of long process, high delay, inability to integrate system optimization, etc., to achieve the effect of simplifying the detection process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
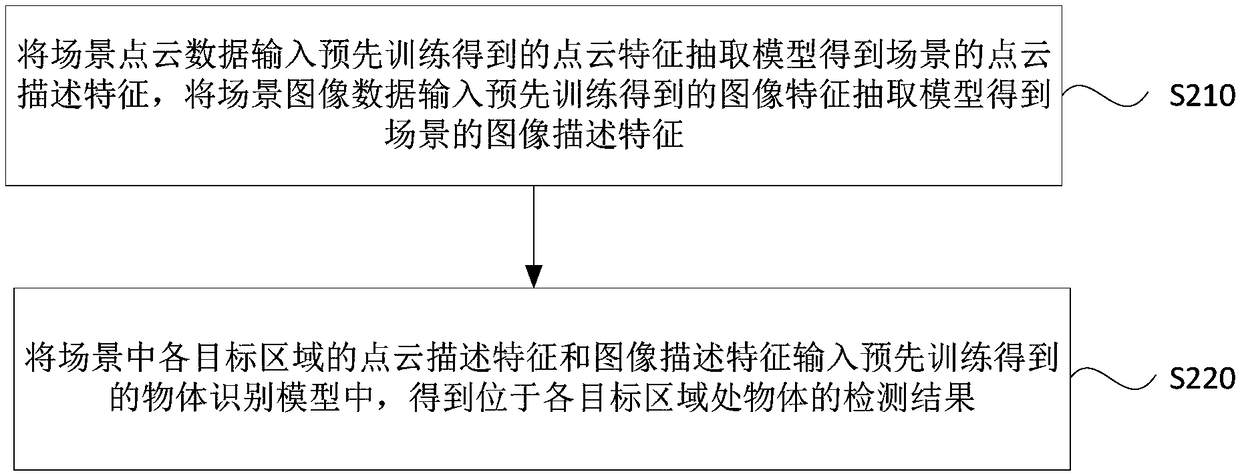
[0031] Figure 2A It is a flow chart of an object detection method provided in Embodiment 1 of the present invention, Figure 2B It is a schematic diagram of an object detection process applicable to the embodiment of the present invention. This embodiment is applicable to the situation of how to simplify the detection process while being able to detect the objects contained in the scene. The method can be executed by the object detection device in the embodiment of the present invention, the device can be implemented in the form of software and / or hardware, the device can be an independent physical device, and can also be configured in a terminal (such as the control of an autonomous driving mobile carrier frame). Such as Figure 2A and 2B As shown, the method specifically includes the following steps:
[0032] S210. Input the scene point cloud data into the pre-trained point cloud feature extraction model to obtain the point cloud description features of the scene, and i...
Embodiment 2
[0047] image 3 It is a flow chart of an object detection method in Embodiment 2 of the present invention. This embodiment is based on the above embodiment, and further inputs the point cloud description features and image description features of each target area in the scene into the pre-trained Explained in Object Recognition Model. Such as image 3 As shown, the method of this embodiment specifically includes the following steps:
[0048] S310. Input the scene point cloud data into the pre-trained point cloud feature extraction model to obtain the point cloud description features of the scene, and input the scene image data into the pre-trained image feature extraction model to obtain the scene image description features.
[0049] S320. Identify the point cloud description features or image description features of each area in the scene to obtain each candidate object included in the scene, and use the area where the candidate object is located as a target area.
[0050]...
Embodiment 3
[0063] Figure 4 It is a schematic structural diagram of an object detection device provided by Embodiment 3 of the present invention. The device can execute the object detection method provided by any embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method. Such as Figure 4 As shown, the device specifically includes: a description feature acquisition module 410 , a three-dimensional field object detection input module 420 and a detection result acquisition module 430 .
[0064] Wherein, the descriptive feature acquisition module 410 is used to input the scene point cloud data into the pre-trained point cloud feature extraction model to obtain the point cloud description features of the scene, and input the scene image data into the pre-trained image feature extraction model to obtain the image of the scene Descriptive features;
[0065] The object detection input module 420 is used to input the point cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More