

Routing method using artificial fish swarm algorithm in hydroacoustic collaborative communication network
An artificial fish swarm algorithm and cooperative communication technology, applied in wireless communication, sustainable communication technology, advanced technology, etc., can solve the problem of low energy consumption, achieve low energy consumption, reduce energy consumption, and reduce the overall cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
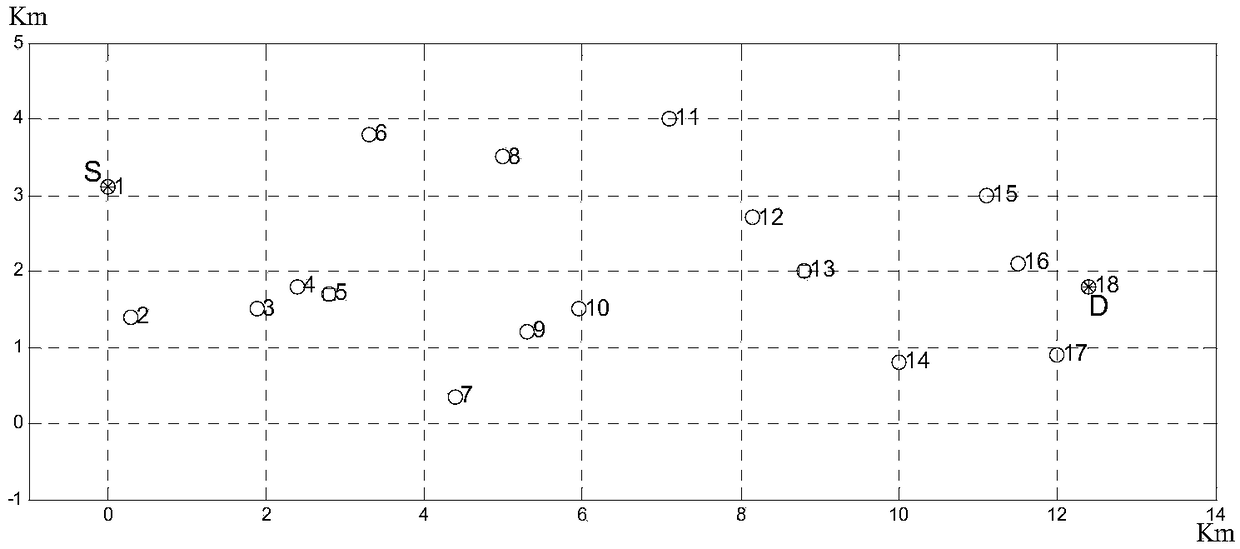
[0039] Such as figure 1 As shown, the embodiment of the present invention includes the following steps:
[0040] 1) Number the candidate routing nodes and calculate the distance between any two nodes, and at the same time perform the initialization operation of the artificial fish. The state information of each artificial fish is defined as one of all node arrangements (that is, any node routing order) , the permutations are randomly generated, and one permutation corresponds to one artificial fish. For example, the state of the artificial fish (1,4,6,18) means starting from node 1, passing through node 4, node 6, and finally reaching node 18;
[0041] 2) The individual artificial fish is expressed as X=(X 1 ,X 2 ,...,X n ), where X α (α=1,...,n) is the optimization variable, and the food concentration at the artificial fish’s position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More