Self-walking material lifting and transport device
A transportation device and self-propelled technology, which is applied in transportation and packaging, conveyor control devices, conveyors, etc., can solve problems such as high transportation costs, brutal construction by unloading personnel, and influence on the development of national industries, so as to achieve convenient clamping, The effect of good cushioning and shock absorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of this patent will be described in further detail below in conjunction with specific embodiments.
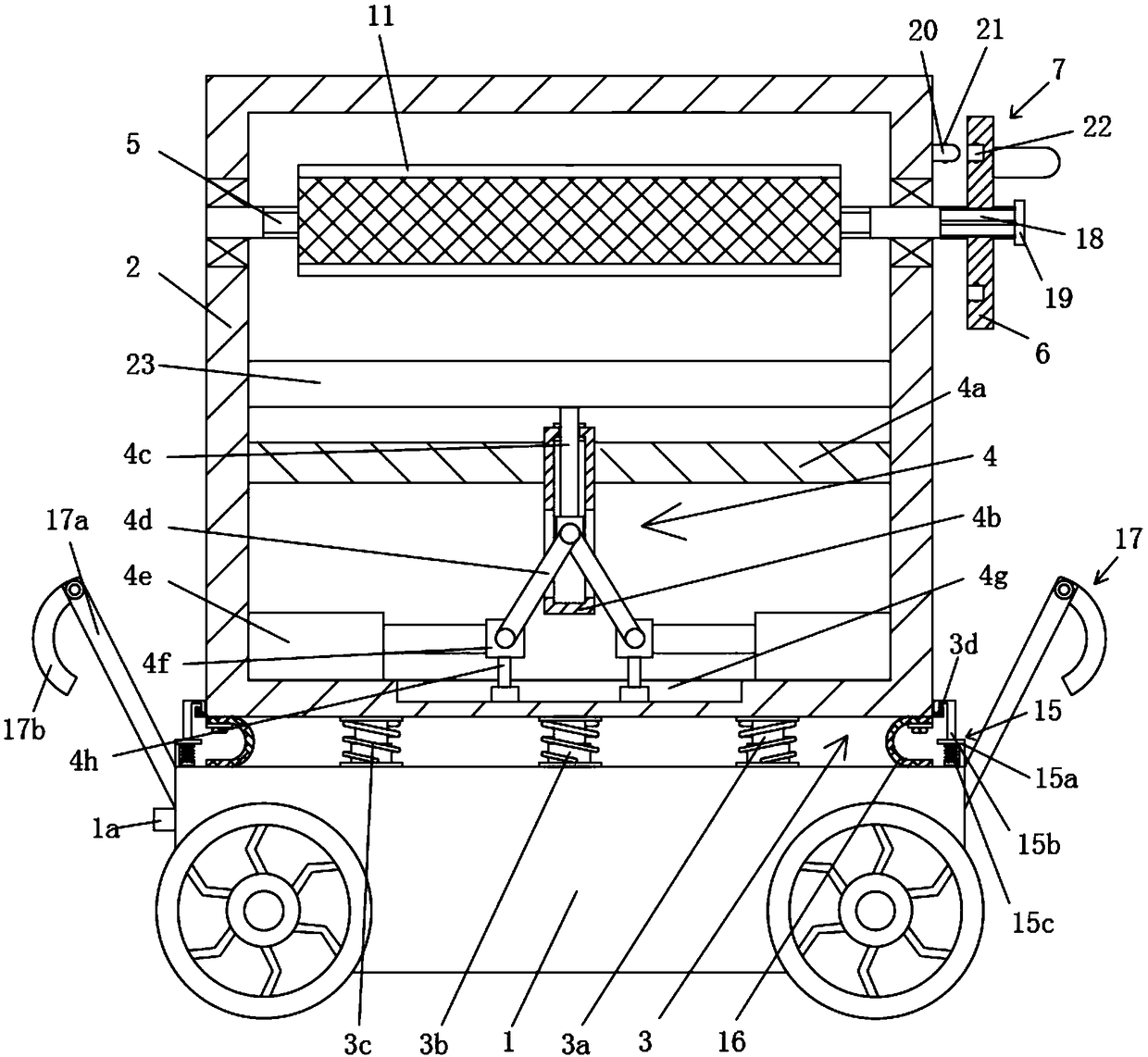
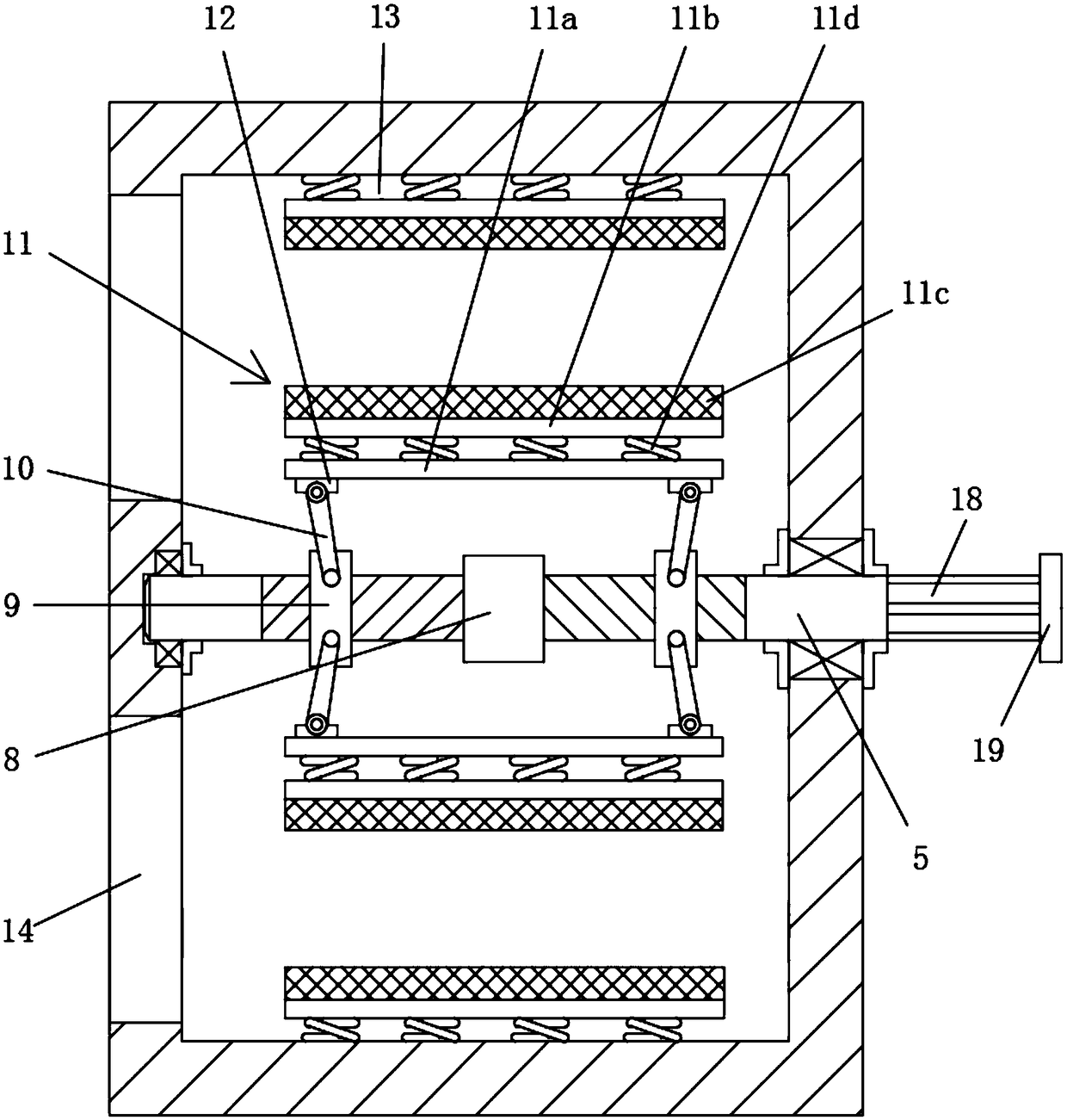
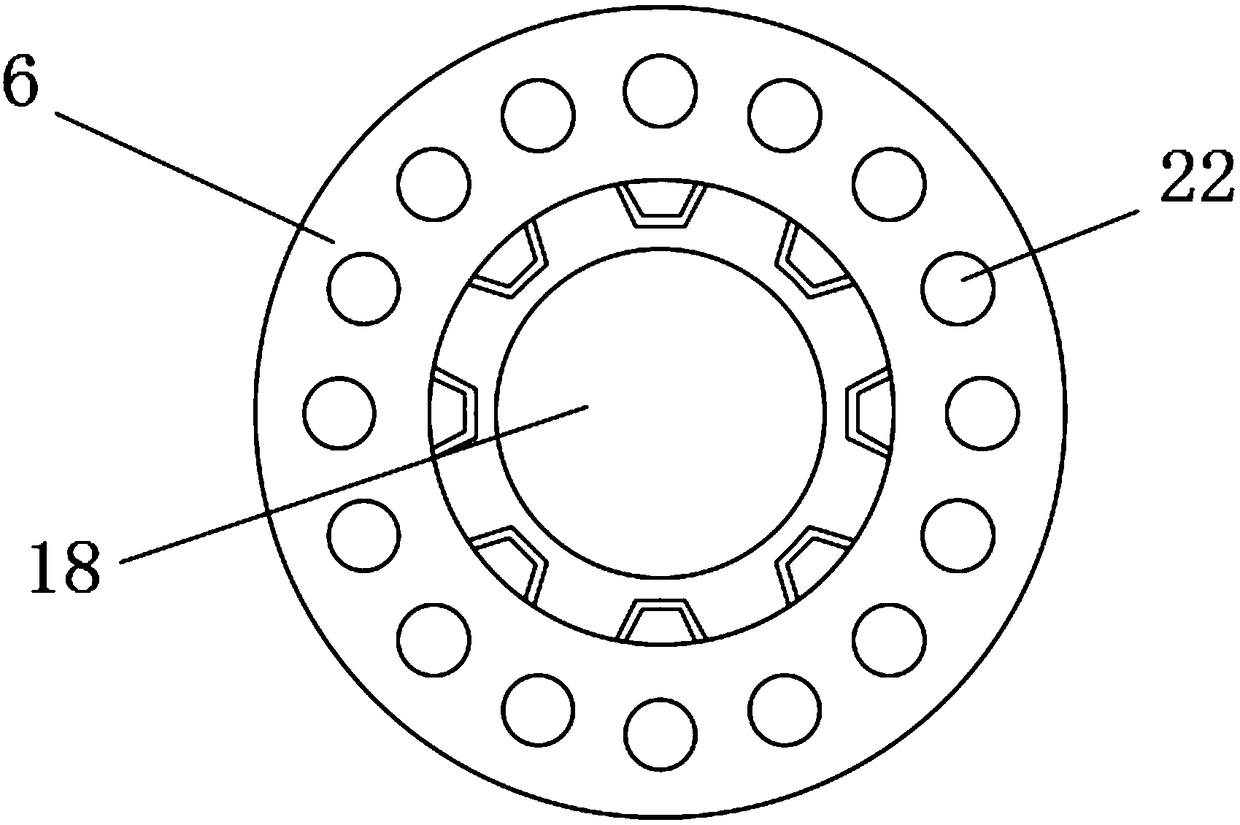
[0026] See Figure 1-3 , A self-propelled material lifting and transportation device, comprising a walking chassis 1, a lidar sensor 1a is provided on the walking chassis 1, and a control unit is connected to the lidar sensor 1a, characterized in that the walking chassis 1 is provided with a transport Box 2, a damping mechanism 3 is provided between the walking chassis 1 and the transport box 2; the walking chassis 1 is connected to the control unit; in this embodiment, the damping mechanism 3 is distributed outside the transport box 2 A number of guide posts 3a at the bottom, a guide sleeve 3b arranged on the walking chassis 1 and sleeved in a one-to-one correspondence with each guide post 3a, and a guide sleeve 3b sleeved on the periphery of the guide post 3a and the guide sleeve 3b and sandwiched between the transport box 2 and the walking chassis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com