

Inertial navigation positioning calibrating method and system based on vision and priori knowledge
An inertial navigation system and inertial navigation technology, which can be applied to measurement devices, instruments, etc., can solve the problem of not being able to process road sign images and 3D images at the same time, and achieve the effects of friendly interaction, wide variety, and expanded application scope.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical means adopted by the present invention to achieve the intended invention purpose are further described below in conjunction with the drawings and preferred embodiments of the present invention.
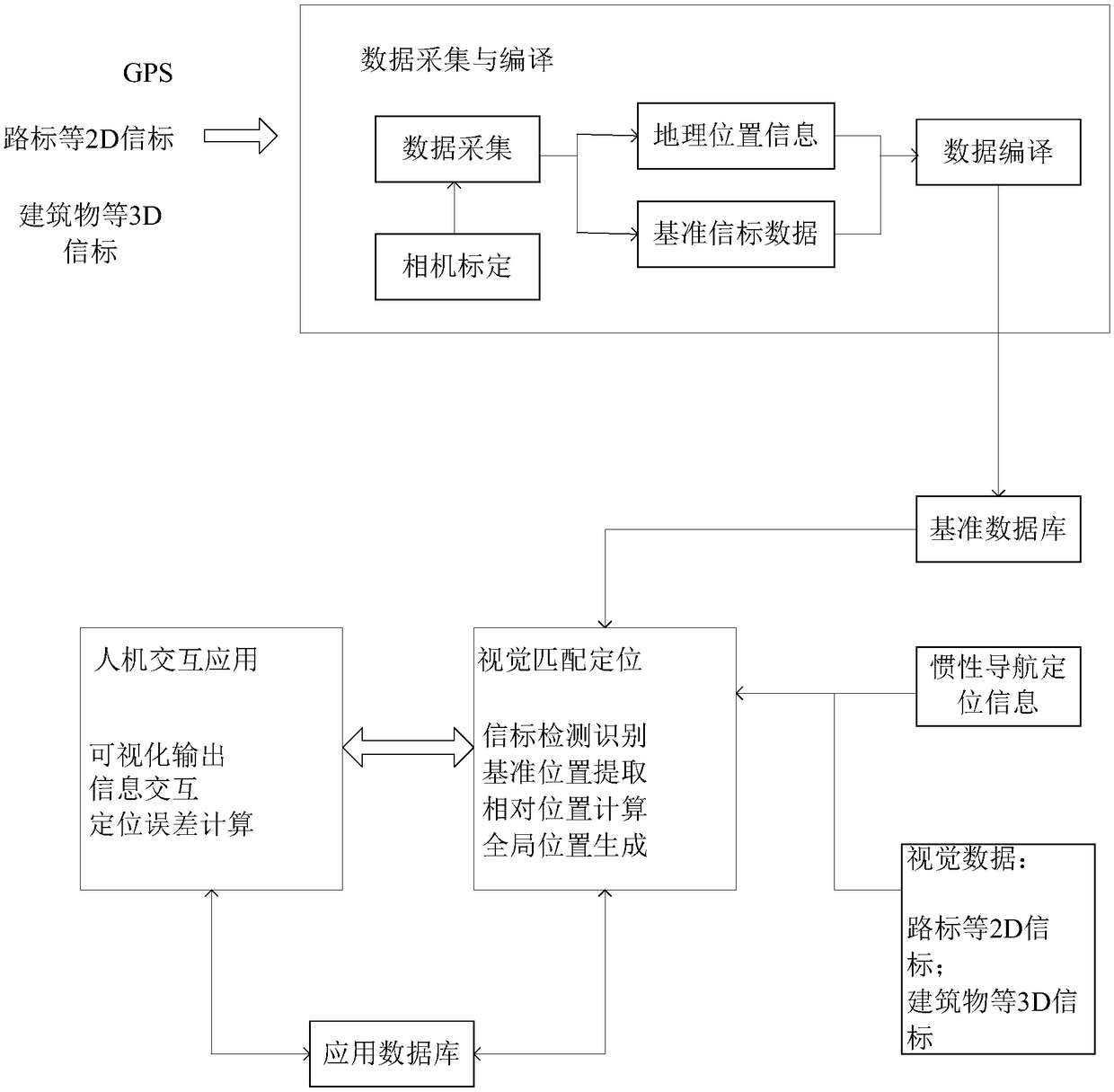
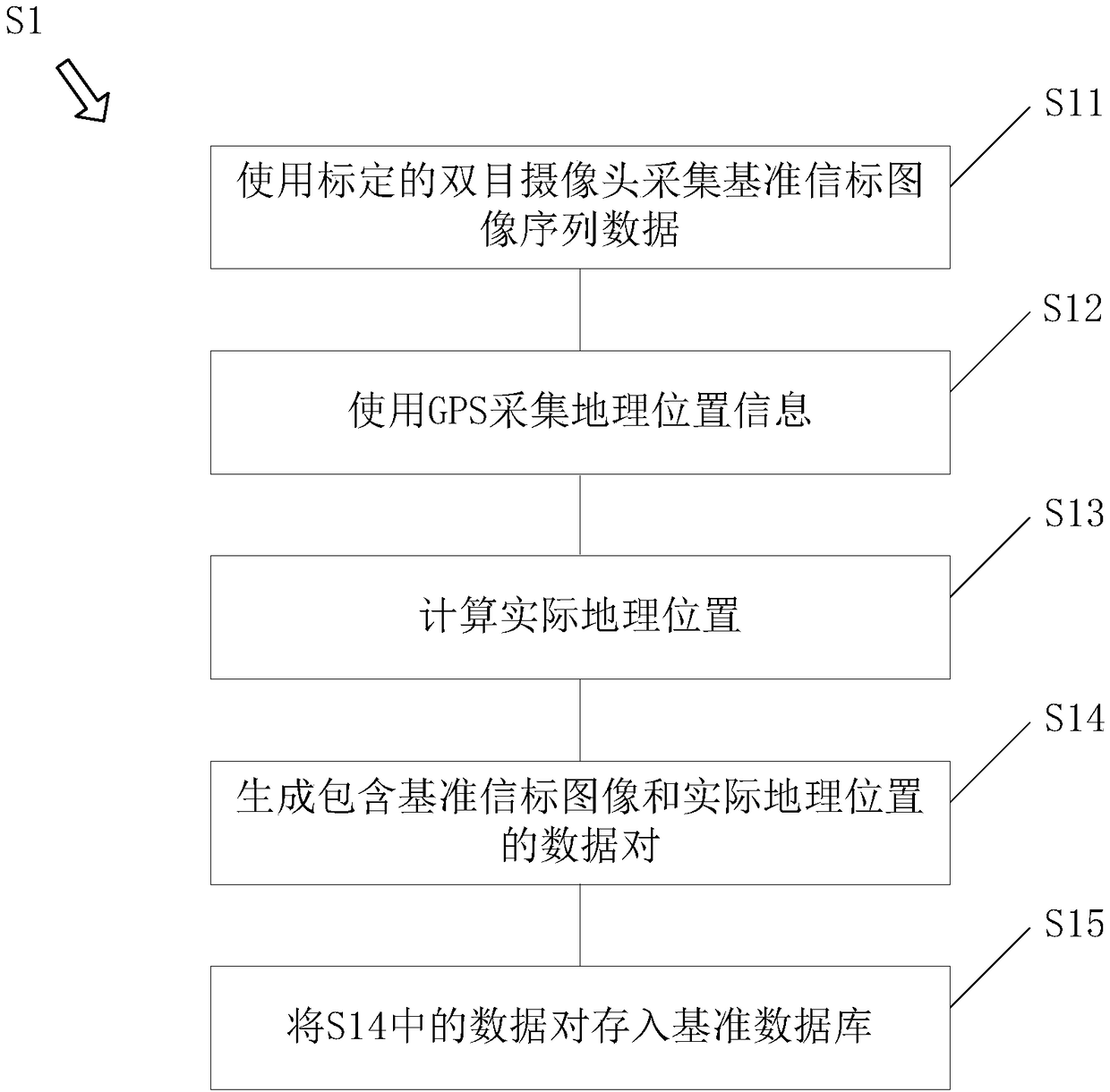
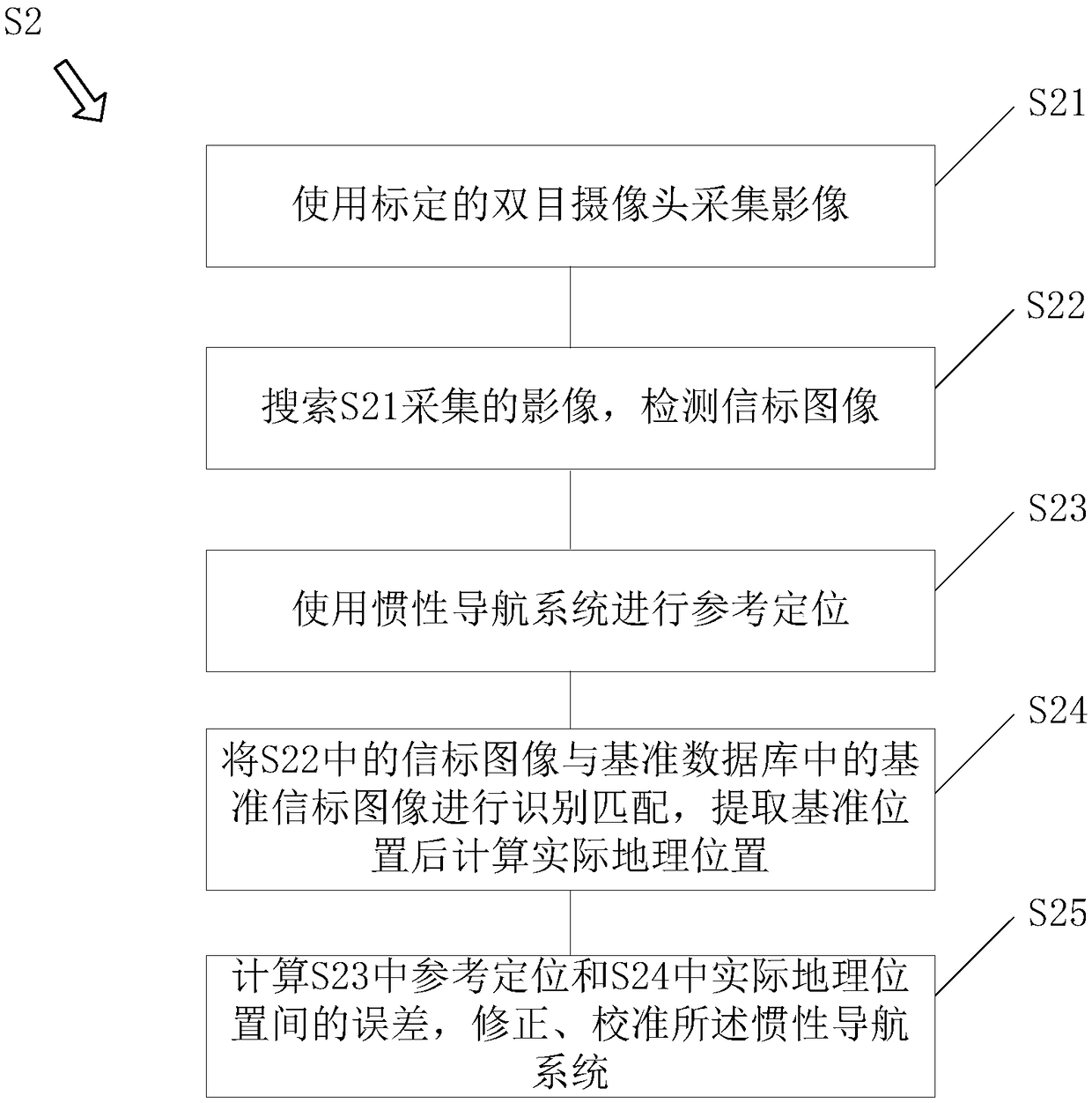
[0022] Such as Figure 1 to Figure 4 As shown, the present invention provides an inertial navigation positioning calibration method based on vision and prior knowledge. The method includes S1, using a binocular camera to collect a reference beacon image, obtaining the geographic location of the reference beacon image through GPS and calculation, generating a data pair and storing it in a reference database; S2, using a binocular camera to collect a real-time beacon image, and matching the real-time Beacon image and reference beacon image, obtain the geographic location of the data alignment, use the obtained geographic location to correct the geographic location provided by the inertial navigation, and calibrate the inertial navigation positioning; the reference b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More