

Yaw control method for tilting vertical take-off and landing fixed-wing UAV in rotor wing mode
A technology for vertical take-off and landing and yaw control, applied in the field of unmanned aerial vehicles, can solve the problems of unstable horizontal attitude of the aircraft and increase the risk of uncontrolled crash, so as to avoid the instability of the aircraft, solve the large jitter of the aircraft, and realize the heading control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
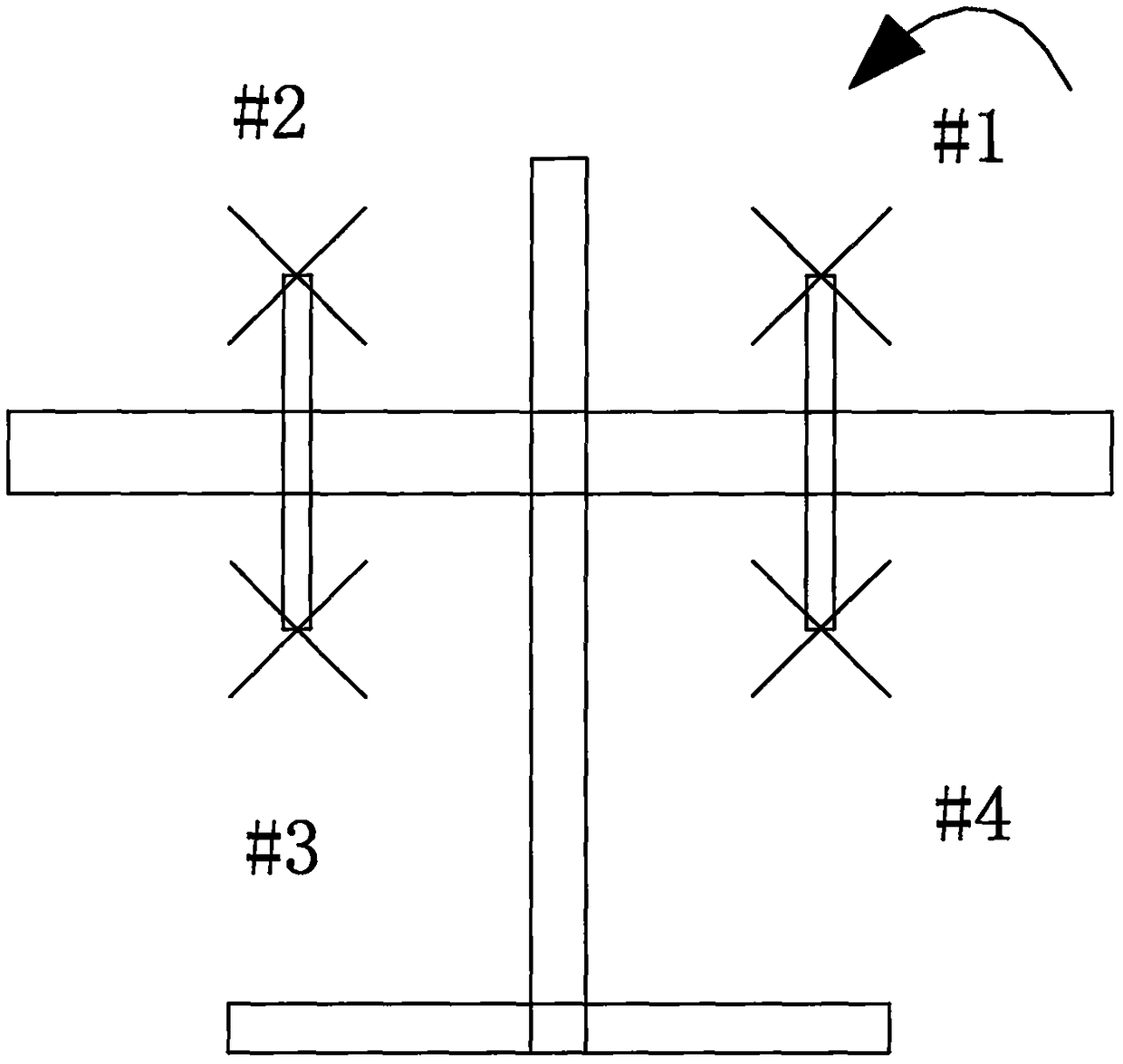
[0020] The following describes the specific implementation of the present invention in conjunction with the accompanying drawings and examples: It should be noted that the above-mentioned left and right sides are all in the top view, with the plane of symmetry of the aircraft as the reference plane, and the direction from the tail to the nose as the reference direction divided into the left side and right side.
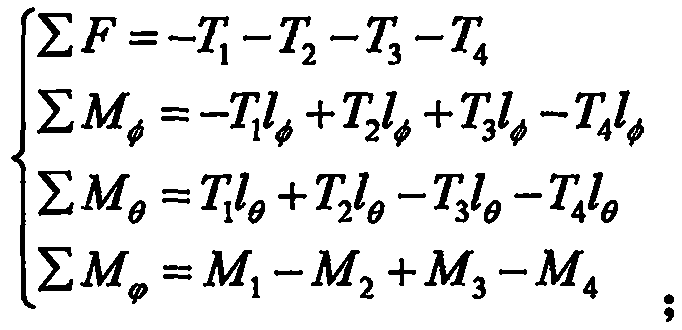
[0021] Such as figure 1 As shown, the yaw control method in the rotor mode of the tilting vertical take-off and landing fixed-wing UAV includes a vertical take-off and landing fixed-wing with a rotor tilting function installed on the fixed-wing wing, wherein the rotor parts are respectively connected for the motor A driven power unit, wherein the rotors on both sides of the front are provided with a tilting device, which is characterized in that the yaw control is realized by controlling the tilting device and four power units, which specifically includes the followin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More