

Unmanned aerial vehicle cluster area covering method and device based on virtual potential field functions
A technology of area coverage and virtual potential field, applied in three-dimensional position/channel control, vehicle position/route/height control, non-electric variable control, etc., can solve the problems that cannot meet the needs of the application, and do not consider the problem of continuous coverage. Achieve the effects of small amount of control calculation, less amount of information processing, and various shapes of coverage areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present application is described in detail below in conjunction with the examples, but the present application is not limited to these examples.
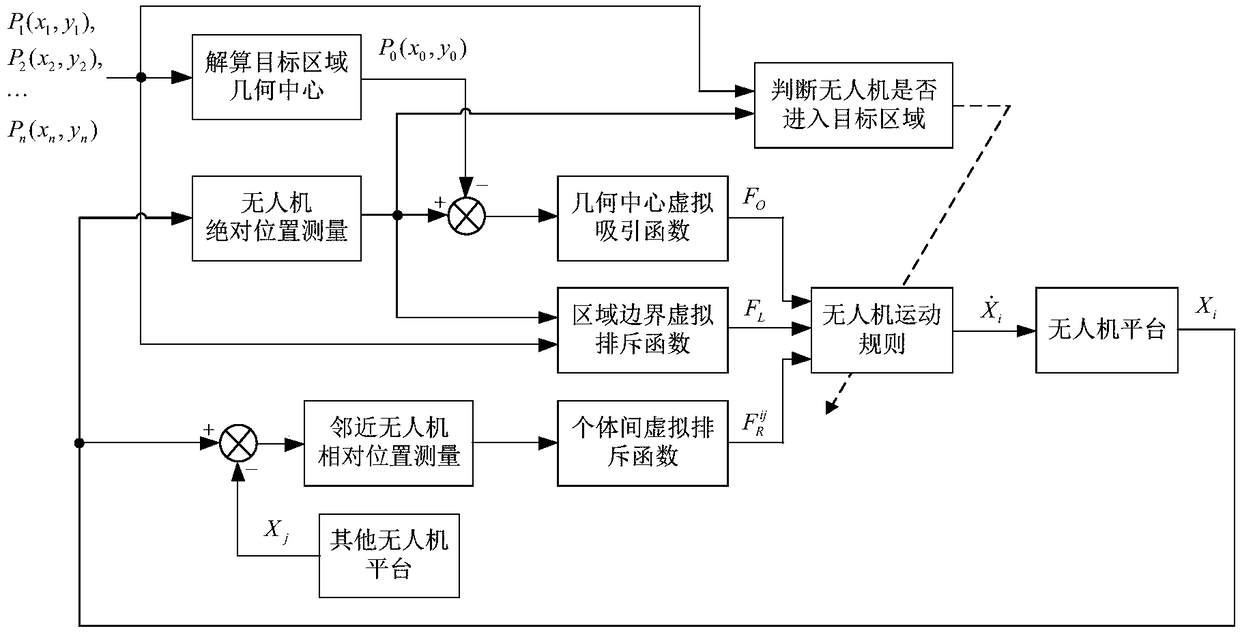
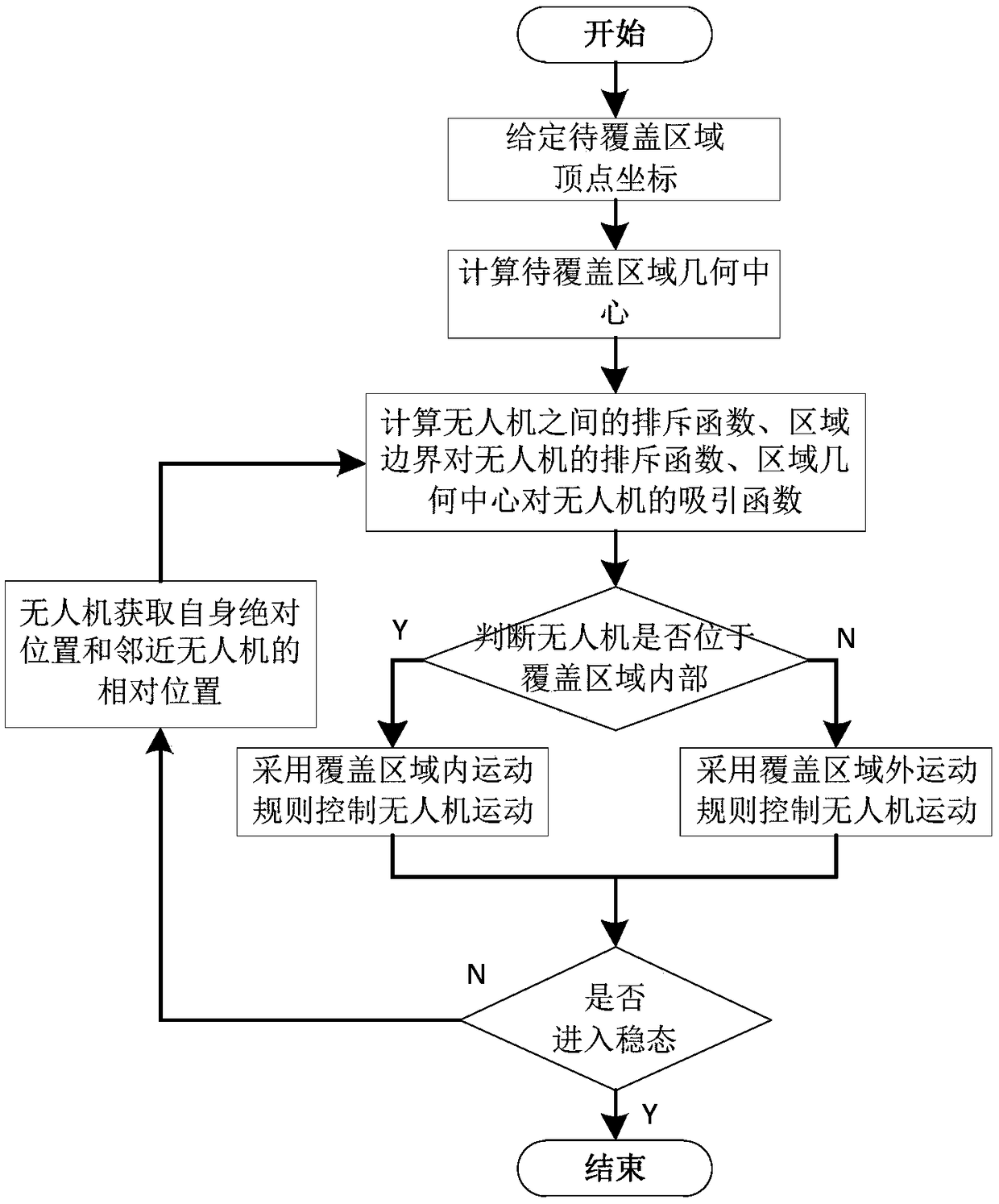
[0092] see figure 1 , the UAV cluster area coverage method based on the virtual potential field function provided by the application, comprising the following steps:
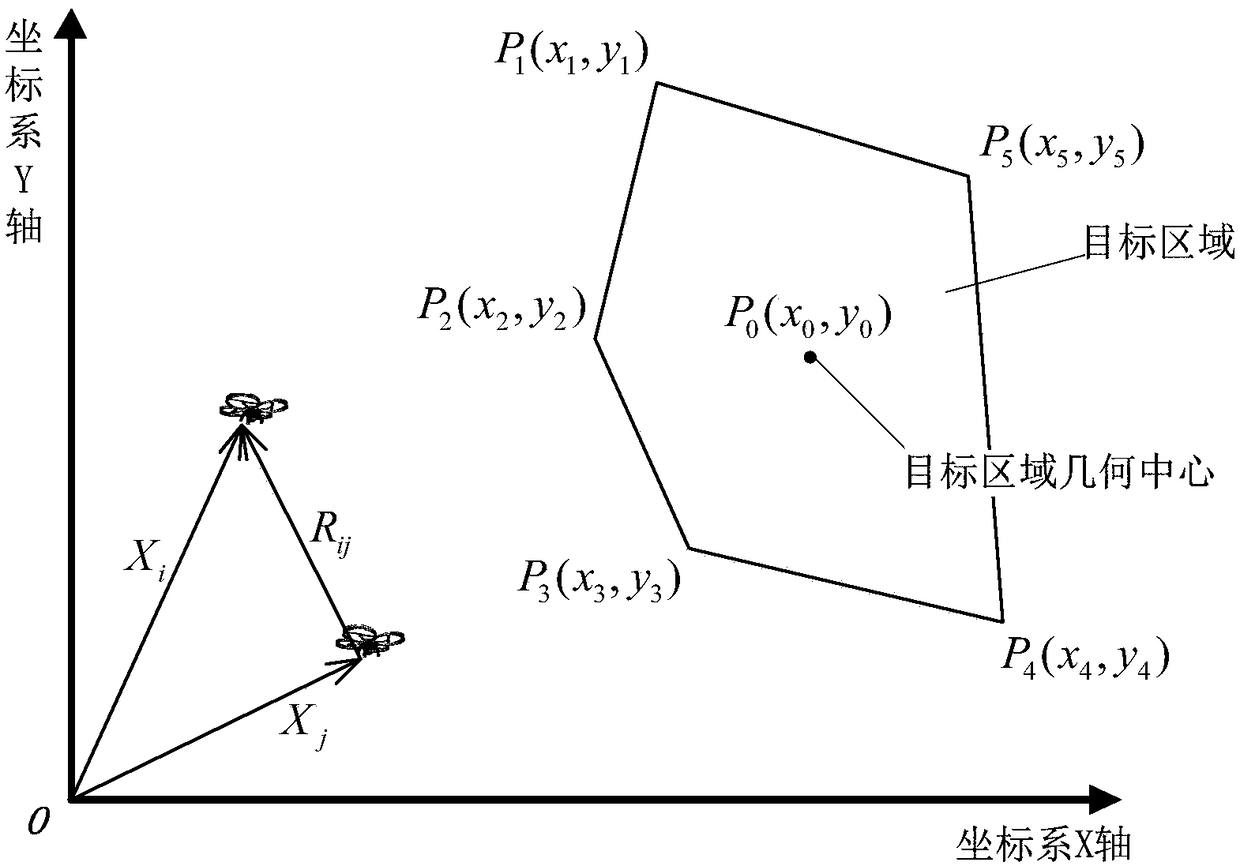
[0093] Step S100: According to the given convex polygon target area vertex coordinates {P 1 (x 1 ,y 1 ),P 2 (x 2 ,y 2 ),...,P n (x n ,y n )} Calculate the geometric center coordinates P of the target area 0 (x 0 ,y 0 ), and then calculate the virtual attraction function F of the geometric center to the drone according to the coordinates of the geometric center of the target area and the measured value of the absolute position of the drone O ;
[0094] Step S200: Calculate the virtual repulsion function F of the area boundary to the drone according to the coordinates of the vertex of the target area and the measured value of the absolute positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More