

Single feedback single drive rigid-flexible coupling platform control method
A rigid-flexible coupling, platform control technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve problems such as control signals not working, control signal fluctuations, reducing system bandwidth, etc., to reduce control complexity, no need to switch Controlled, Simple-Structured Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
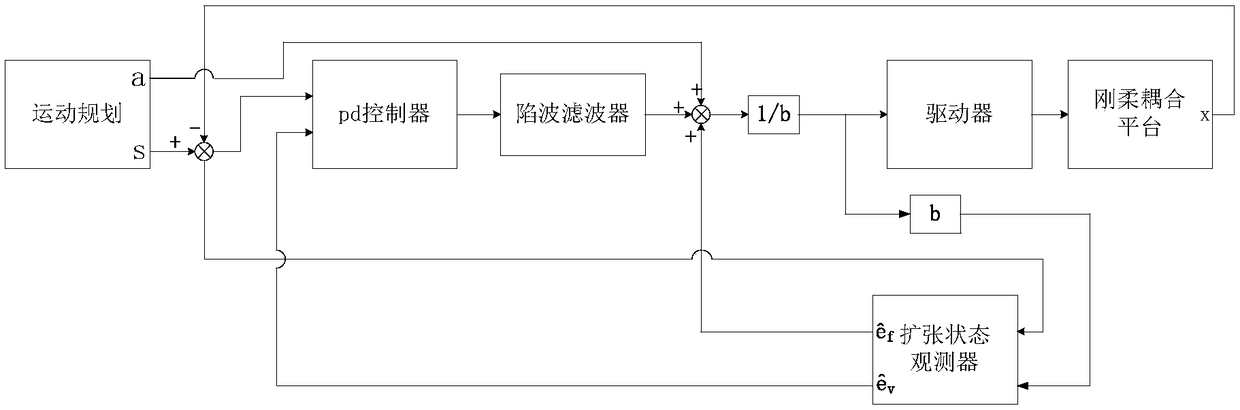
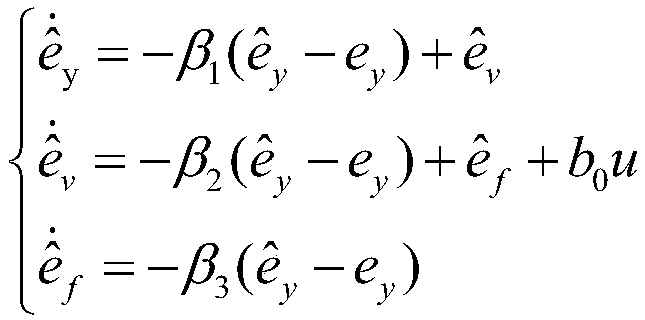
[0056] The control method of the rigid-flexible coupling platform based on single feedback and single drive in this embodiment is single-measurement-displacement single-drive motion control, corresponding to the first case above. In this scheme, the superscript dot on the parameter indicates the derivative, and the number of dots is the order of the derivative; the superscript ^ on the parameter indicates the estimated value.
[0057] Such as figure 1 As shown, in the embodiment of the present invention, the rigid-flexible coupling platform mainly includes mechanical guide rails, frame rigid bodies, flexible hinges, and working platforms. Set x as the displacement of the working platform, m as the inertia of the working platform, and F as the function of the driving unit The driving force on the working platform, f is the disturbance force of the system, s, v, a are the displacement information, velocity information and acceleration information of motion planning respectively....
Embodiment 2
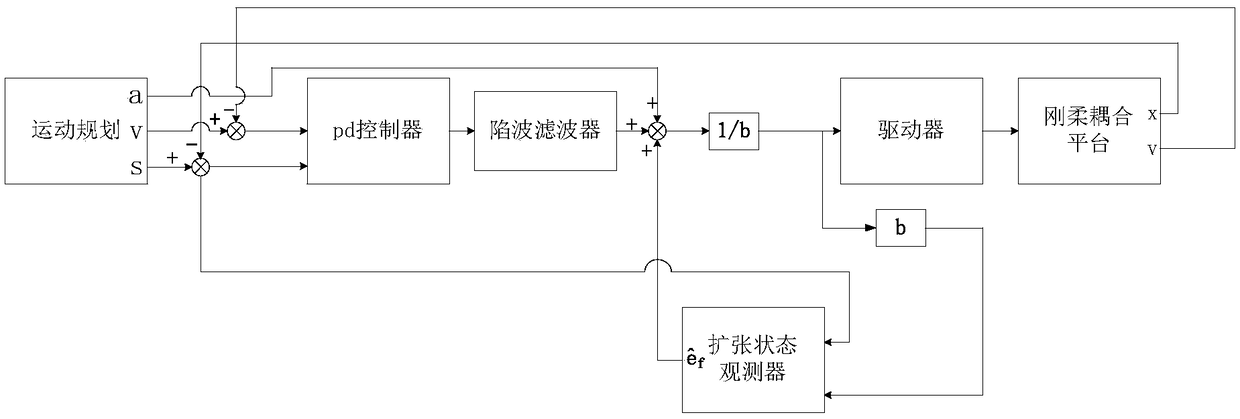
[0083] In this embodiment, based on the single-feedback single-drive rigid-flexible coupling platform control method, the single-measurement displacement speed single-drive motion control corresponds to the second case above.
[0084] Such as figure 2 As shown, in the embodiment of the present invention, the rigid-flexible coupling platform mainly includes a mechanical guide rail, a frame rigid body, a flexible hinge, and a working platform. Set x as the displacement of the working platform, is the velocity of the working platform, m is the inertia of the working platform, F is the driving force of the driving unit acting on the working platform, f is the disturbance force of the system, s, v, a are the displacement, velocity and acceleration of the motion planning, respectively.
[0085] Maximum acceleration a max The calculation method of is the same as that in Embodiment 1, and will not be repeated here.
[0086] After setting the maximum planning acceleration, it can e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More