

A Control Method of Rigid-Flexible Coupling Motion Platform Based on Disturbance Force Compensation
A control method, rigid-flexible coupling technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems that it is difficult to meet the needs of high-speed precision motion control, LADRC cannot adapt to high bandwidth requirements, and the control process is complicated, etc., to achieve reduced control Complexity, avoiding noise, and achieving high-speed precision motion effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
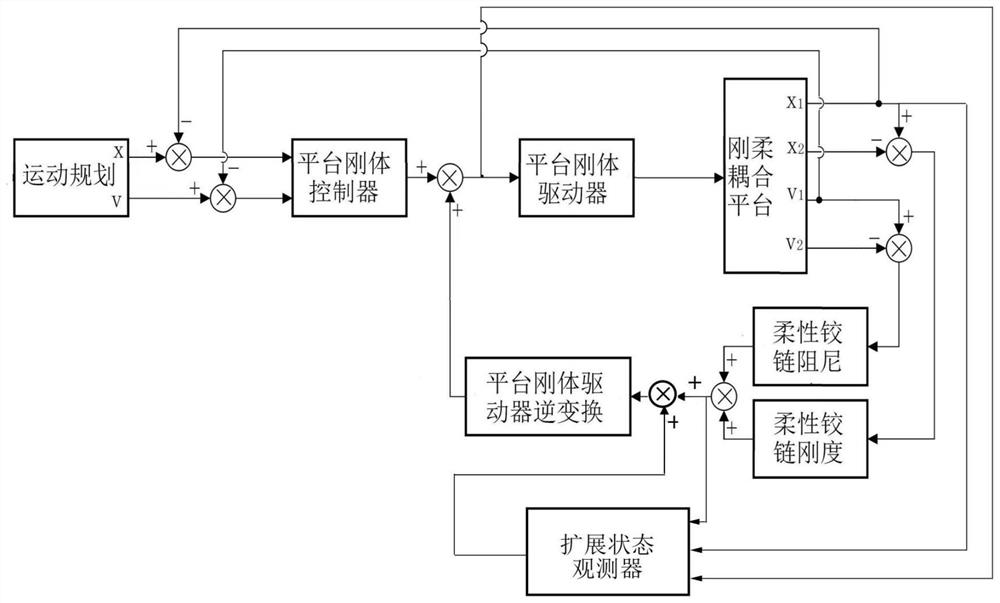
[0048] like figure 1 As shown, in the embodiment of the present invention, the rigid-flexible coupling platform mainly includes a mechanical guide rail, a frame rigid body, a flexible hinge, and a platform rigid body. M ,X m are the displacements of the frame rigid body and the platform rigid body, respectively, are the velocities of the frame rigid body and the platform rigid body, respectively, M, m are the mass of the frame rigid body and the platform rigid body, respectively, k, c are the stiffness and damping of the flexible hinge, F M ,F m are the driving force of the driving unit acting on the frame rigid body and the platform rigid body, respectively, f μ is the friction force between the frame rigid body and the mechanical guide rail.
[0049] The rigid-flexible coupled motion platform control method based on disturbance force compensation in this embodiment is single-drive motion control, and the mechanical response equation of the platform rigid body motion is:...
Embodiment 2
[0072] like Figure 8 As shown, in the embodiment of the present invention, the rigid-flexible coupling platform mainly includes a mechanical guide rail, a frame rigid body, a flexible hinge, and a platform rigid body. M ,X m are the displacements of the frame rigid body and the platform rigid body, respectively, are the velocities of the frame rigid body and the platform rigid body, respectively, M, m are the mass of the frame rigid body and the platform rigid body, respectively, k, c are the stiffness and damping of the flexible hinge, F M ,F m are the driving force of the driving unit acting on the frame rigid body and the platform rigid body, respectively, f μ is the friction force between the frame rigid body and the mechanical guide rail.
[0073] The control method of the rigid-flexible coupled motion platform based on disturbance force compensation in this embodiment is dual-drive motion control, wherein the mechanical response equation of the rigid body motion of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More